36 releases
| 0.9.1 | Jun 23, 2021 |
|---|---|
| 0.8.2 | May 9, 2021 |
| 0.7.0 | Jan 30, 2021 |
| 0.6.5 | Nov 27, 2020 |
| 0.1.0 | Dec 27, 2018 |
#7 in #gfx-rs
14,507 downloads per month
Used in fewer than 10 crates
795KB
16K
SLoC
gfx-backend-metal
Metal backend for gfx-rs.
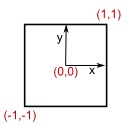
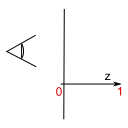
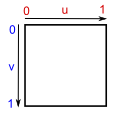
Normalized Coordinates
| Render | Depth | Texture |
|---|---|---|
 |
 |
 |
Binding Model
Dimensions of the model:
- Shader stage: vs, fs, cs
- Register: buffers, textures, samplers
- Binding: 0..31 buffers, 0..128 textures, 0..16 samplers
Mirroring
TODO
Dependencies
~11–22MB
~288K SLoC