25 releases (7 breaking)
Uses new Rust 2024
| 0.8.0 | May 18, 2025 |
|---|---|
| 0.7.0 | Mar 30, 2025 |
| 0.5.4 | Dec 29, 2024 |
#229 in Math
130 downloads per month
94KB
2K
SLoC
camera-intrinsic-calibration
![]()
![]()
![]()
A pure rust camera intrinsic calibration tool.
Installation
# cargo install cli
cargo install camera-intrinsic-calibration
# Or pip install cli
pip install camera-intrinsic-calibration
Or download from the latest release.
CLI Usage
# camera-calibration-rs
ccrs -h
# run intrinsic calibration on TUM vi dataset
# Download and untar
wget https://vision.in.tum.de/tumvi/exported/euroc/1024_16/dataset-calib-cam1_1024_16.tar
tar xf dataset-calib-cam1_1024_16.tar
# [Optional] export RUST_LOG=trace
ccrs dataset-calib-cam1_1024_16 --model eucm
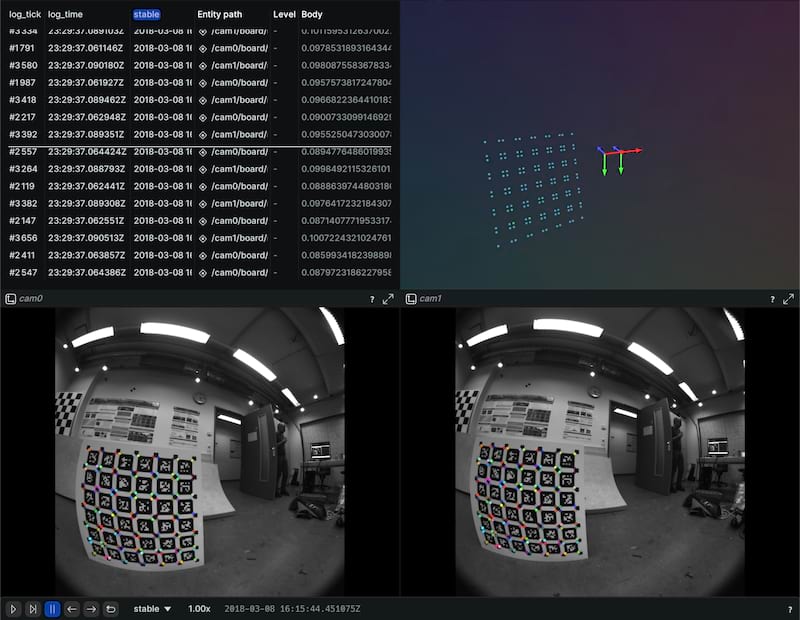
Visualize details after calibration
# use cargo to install rerun
cargo install rerun-cli --version 0.23.2
# or use pip to install rerun
pip install rerun-sdk==0.23.2
# visualize result
rerun results/20YYMMDD_HH_MM_SS/logging.rrd
Supported formats
Dataset format
- Euroc (default)
dataset_root └── mav0 ├── cam0 │ └── data │ ├── {time_stamp}.png │ ├── {time_stamp}.png │ └── {time_stamp}.png └── cam1 └── data ├── {time_stamp}.png ├── {time_stamp}.png └── {time_stamp}.png - General
--dataset-format general
Images can be eitherdataset_root ├── cam0 │ ├── any_file_name.png │ ├── any_file_name.png │ └── any_file_name.png └── cam1 ├── any_file_name.png ├── any_file_name.png └── any_file_name.png.pngor.jpg, but.pngis preferred if possible. PNG is lossless compression, while JPG is not.
Camera models
- Extended Unified (EUCM)
- Extended Unified with Tangential (EUCMT)
- Unified Camera Model (UCM)
- Kannala Brandt (KB4) aka OpenCV Fisheye
- OpenCV (OPENCV5) aka
plumb_bobin ROS - F-theta (FTHETA) by NVidia
Examples
cargo run -r --example convert_model
Calibrate your own camera
Please follow the tutorial.
Acknowledgements
Links:
- https://cvg.cit.tum.de/data/datasets/visual-inertial-dataset
- https://github.com/itt-ustutt/num-dual
- https://github.com/sarah-quinones/faer-rs
Papers:
- Kukelova, Zuzana, et al. "Radial distortion homography." Proceedings of the IEEE conference on computer vision and pattern recognition. 2015.
TODO
- Multi-camera extrinsic
- More calibration info
Dependencies
~56–91MB
~1.5M SLoC