27 releases (14 breaking)
| 0.17.1 | Apr 26, 2025 |
|---|---|
| 0.17.0 | Mar 16, 2025 |
| 0.16.0 | Jan 24, 2025 |
| 0.13.0 | Dec 26, 2024 |
| 0.4.1 | Mar 24, 2024 |
#193 in Math
212 downloads per month
Used in 3 crates
245KB
2K
SLoC
tiny-solver-rs
![]()
Inspired by ceres-solver, tiny-solver, and minisam.
This is a general optimizer written in Rust, including bindings for Python. If you're familiar with ceres-solver or factor-graph optimizers, you'll find it very easy to use.
Other great rust optimizers
Installation
rust
cargo add tiny-solver
Current Features
- Automatic Derivatives using num-dual
- Sparse QR, Sparse Cholesky using faer
- GaussNewtonOptimizer
- LevenbergMarquardtOptimizer
- Multithreading jacobian
- loss functions (Huber, CauchyLoss, ArctanLoss)
- Parameter on manifold (SO3, SE3)
TODO
- information matrix
Benchmark
On m3 macbook air
| dataset | tiny-solver | gtsam | minisam |
|---|---|---|---|
| m3500 | 128.3ms | 130.7ms | 123.6 ms |
It's not extremely optimized, but it's easy to install and use.
Usage
Rust
// define your own Cost/Factor struct
// impl residual function
// and the jacobian will be auto generated
use nalgebra as na;
struct CustomFactor {}
impl<T: na::RealField> tiny_solver::factors::Factor<T> for CustomFactor {
fn residual_func(&self, params: &[nalgebra::DVector<T>]) -> nalgebra::DVector<T> {
let x = ¶ms[0][0];
let y = ¶ms[1][0];
let z = ¶ms[1][1];
na::dvector![
x.clone()
+ y.clone() * T::from_f64(2.0).unwrap()
+ z.clone() * T::from_f64(4.0).unwrap(),
y.clone() * z.clone()
]
}
}
fn main() {
// init logger, `export RUST_LOG=trace` to see more log
env_logger::init();
// init problem (factor graph)
let mut problem = tiny_solver::Problem::new();
// add residual blocks (factors)
// add residual x needs to be close to 3.0
problem.add_residual_block(
1,
&["x"],
Box::new(tiny_solver::factors::PriorFactor {
v: na::dvector![3.0],
}),
None,
);
// add custom residual for x and yz
problem.add_residual_block(2, &["x", "yz"], Box::new(CustomFactor), None);
// the initial values for x is 0.7 and yz is [-30.2, 123.4]
let initial_values = HashMap::<String, na::DVector<f64>>::from([
("x".to_string(), na::dvector![0.7]),
("yz".to_string(), na::dvector![-30.2, 123.4]),
]);
// initialize optimizer
let optimizer = tiny_solver::GaussNewtonOptimizer::new();
// optimize
let result = optimizer.optimize(&problem, &initial_values, None);
// result
for (k, v) in result {
println!("{}: {}", k, v);
}
}
You can find other examples in
- https://github.com/powei-lin/camera-intrinsic-calibration-rs/blob/main/src/util.rs
- https://github.com/powei-lin/b-spline/blob/main/src/so3bspline.rs
Python (Currently not maintaining)
import numpy as np
from tiny_solver import Problem, GaussNewtonOptimizer
from tiny_solver.factors import PriorFactor, PyFactor
# define custom cost function in python
# the trade off is the jacobian for the problem cannot be done in parallel
# because of gil
def cost(x: np.ndarray, yz: np.ndarray) -> np.ndarray:
r0 = x[0] + 2 * yz[0] + 4 * yz[1]
r1 = yz[0] * yz[0]
return np.array([r0, r1])
def main():
# initialize problem (factor graph)
problem = Problem()
# factor defined in python
custom_factor = PyFactor(cost)
problem.add_residual_block(
2,
[
("x", 1),
("yz", 2),
],
custom_factor,
None,
)
# prior factor import from rust
prior_factor = PriorFactor(np.array([3.0]))
problem.add_residual_block(1, [("x", 1)], prior_factor, None)
# initial values
init_values = {"x": np.array([0.7]), "yz": np.array([-30.2, 123.4])}
# optimizer
optimizer = GaussNewtonOptimizer()
result_values = optimizer.optimize(problem, init_values)
# result
for k, v in result_values.items():
print(f"{k}: {v}")
if __name__ == "__main__":
main()
Example
Basic example
cargo run -r --example small_problem
M3500 dataset
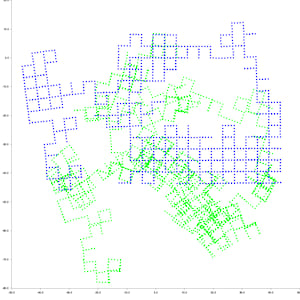
git clone https://github.com/powei-lin/tiny-solver-rs.git
cd tiny-solver-rs
# run rust version
cargo run -r --example m3500_benchmark
# run python version
pip install tiny-solver matplotlib
python3 examples/python/m3500.py
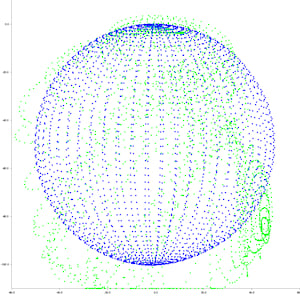
Sphere 2500 dataset
cargo run -r --example sphere2500
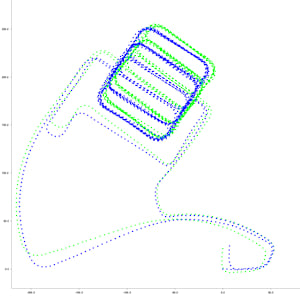
Parking garage dataset
cargo run -r --example parking-garage
Dependencies
~13MB
~282K SLoC