3 unstable releases
| 0.1.0 | Oct 25, 2022 |
|---|---|
| 0.0.2 | Mar 29, 2021 |
| 0.0.1 | Dec 27, 2017 |
#1486 in Algorithms
249 downloads per month
Used in 9 crates
(2 directly)
110KB
354 lines
trajectory
![]()
![]()
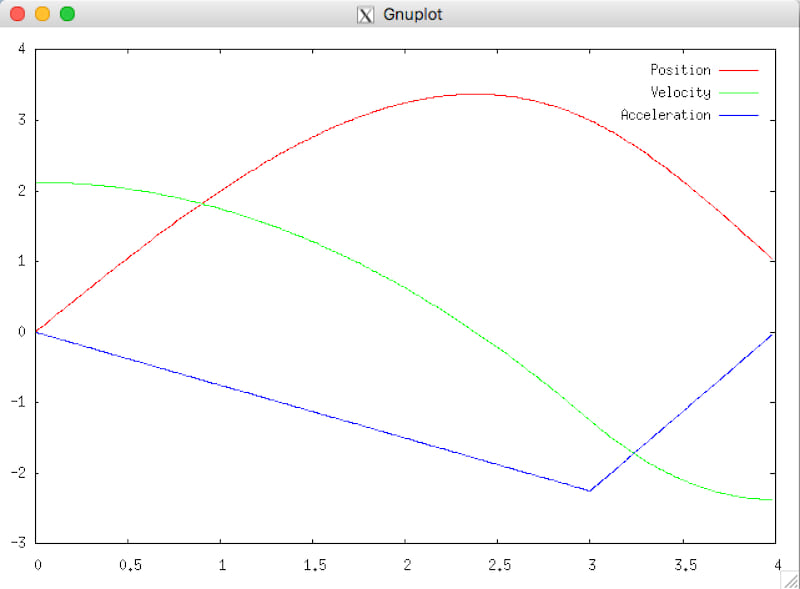
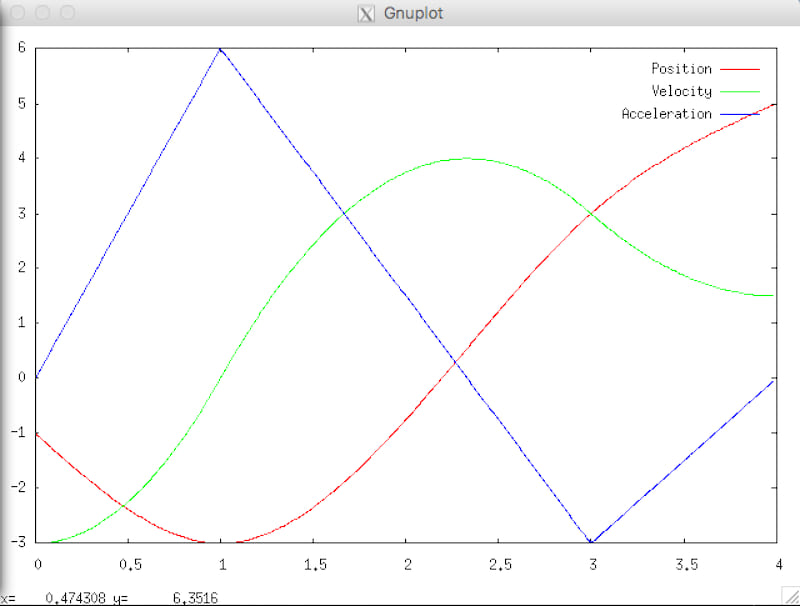
Trajectory interpolator for Rust.
Code example
use trajectory::{CubicSpline, Trajectory};
let times = vec![0.0_f64, 1.0, 3.0, 4.0];
let points = vec![
vec![0.0, -1.0],
vec![2.0, -3.0],
vec![3.0, 3.0],
vec![1.0, 5.0],
];
let ip = CubicSpline::new(times, points).unwrap();
for i in 0..400 {
let t = i as f64 * 0.01_f64;
let p = ip.position(t).unwrap();
let v = ip.velocity(t).unwrap();
let a = ip.acceleration(t).unwrap();
}
Run example
It requires gnuplot.
cargo run --example plot