55 releases (32 breaking)
| 0.32.0 | Sep 10, 2024 |
|---|---|
| 0.31.0 | Nov 8, 2023 |
| 0.30.0 | Apr 28, 2023 |
| 0.29.1 | Dec 7, 2022 |
| 0.6.0 | Nov 23, 2017 |
#71 in Algorithms
14,693 downloads per month
Used in 11 crates
(8 directly)
155KB
2.5K
SLoC
k: Kinematics library for rust-lang
![]()
![]()
![]()
k has below functionalities.
- Forward kinematics
- Inverse kinematics
- URDF Loader
k uses nalgebra as math library.
See Document and examples/ for more details.
Requirements to build examples
sudo apt install g++ cmake xorg-dev libglu1-mesa-dev
IK example with GUI
cargo run --release --example interactive_ik
Push below keys to move the end of the manipulator.
f: forwardb: backwardp: upn: downl: leftr: rightz: reset the manipulator state.
Create link tree from urdf and solve IK
use k::prelude::*;
fn main() {
// Load urdf file
let chain = k::Chain::<f32>::from_urdf_file("urdf/sample.urdf").unwrap();
println!("chain: {chain}");
// Set initial joint angles
let angles = vec![0.2, 0.2, 0.0, -1.0, 0.0, 0.0, 0.2, 0.2, 0.0, -1.0, 0.0, 0.0];
chain.set_joint_positions(&angles).unwrap();
println!("initial angles={:?}", chain.joint_positions());
let target_link = chain.find("l_wrist_pitch").unwrap();
// Get the transform of the end of the manipulator (forward kinematics)
chain.update_transforms();
let mut target = target_link.world_transform().unwrap();
println!("initial target pos = {}", target.translation);
println!("move z: +0.1");
target.translation.vector.z += 0.1;
// Create IK solver with default settings
let solver = k::JacobianIkSolver::default();
// Create a set of joints from end joint
let arm = k::SerialChain::from_end(target_link);
// solve and move the manipulator angles
solver.solve(&arm, &target).unwrap();
println!("solved angles={:?}", chain.joint_positions());
chain.update_transforms();
let solved_pose = target_link.world_transform().unwrap();
println!("solved target pos = {}", solved_pose.translation);
}
Structure of API
Top level interface is Chain struct. It contains Nodes and they have the relations between nodes (parent/children).
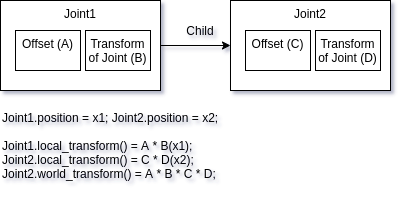
Actual data (joint angle(position), transform between nodes) is stored in Joint object inside nodes.
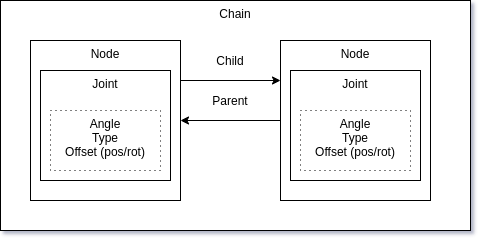
You can get local/world transform of nodes. See below figure to understand what is the node's local_transform() and world_transform().
OpenRR Community
Here is a discord server for OpenRR users and developers.
Dependencies
~9.5MB
~176K SLoC