20 releases
Uses old Rust 2015
| 0.3.8 | Aug 8, 2016 |
|---|---|
| 0.3.7 | Jun 24, 2016 |
| 0.2.9 | May 29, 2016 |
| 0.2.6 | Feb 27, 2016 |
| 0.1.3 | Jul 17, 2015 |
#440 in Geospatial
40 downloads per month
580KB
4K
SLoC
![]()
![]()
![]()
![]()
![]()
Introduction
 A Rust library with FFI bindings for fast conversion between WGS84 longitude and latitude and British National Grid ([epsg:27700](http://spatialreference.org/ref/epsg/osgb-1936-british-national-grid/)) coordinates, using a Rust binary. Conversions use a standard 7-element Helmert transform with the addition of OSTN02 corrections for [accuracy](#accuracy).
A Rust library with FFI bindings for fast conversion between WGS84 longitude and latitude and British National Grid ([epsg:27700](http://spatialreference.org/ref/epsg/osgb-1936-british-national-grid/)) coordinates, using a Rust binary. Conversions use a standard 7-element Helmert transform with the addition of OSTN02 corrections for [accuracy](#accuracy).
Motivation
Python (etc.) is relatively slow; this type of conversion is usually carried out in bulk, so an order-of-magnitude improvement using FFI saves both time and energy.
Accuracy
Conversions which solely use Helmert transforms are accurate to within around 5 metres, and are not suitable for calculations or conversions used in e.g. surveying. Thus, we use the OSTN02 transform, which adjusts for local variation within the Terrestrial Reference Frame by incorporating OSTN02 data. See here for more information.
The OSTN02-enabled functions are:
- convert_bng_threaded (an alias for convert_osgb36_threaded)
- convert_bng_threaded_vec ← FFI version of the above
- convert_lonlat_threaded (an alias for convert_osgb36_to_ll)
- convert_lonlat_threaded_vec ← FFI version of the above
- convert_osgb36
- convert_etrs89_to_osgb36
- convert_to_osgb36_threaded ← FFI
- convert_to_osgb36_threaded_vec
- convert_etrs89_to_osgb36_threaded ← FFI
- convert_etrs89_to_osgb36_threaded_vec
- convert_osgb36_to_ll_threaded ← FFI
- convert_osgb36_to_ll_threaded_vec
- convert_osgb36_to_etrs89_threaded ← FFI
- convert_osgb36_to_etrs89_threaded_vec
Library Use
As a Rust Library
Add the following to your Cargo.toml (the latest version is displayed on the fourth badge at the top of this screen)
lonlat_bng = "x.x.x"
Full library documentation is available here
Note that lon, lat coordinates outside the UK bounding box will be transformed to (NAN, NAN), which cannot be mapped.
The functions exposed by the library can be found here
As an FFI Library
The FFI C-compatible functions exposed by the library are:
convert_to_bng_threaded(Array, Array) -> Array
convert_to_lonlat_threaded(Array, Array) -> Array
convert_to_osgb36_threaded(Array, Array) -> Array
convert_to_etrs89_threaded(Array, Array) -> Array)
convert_osgb36_to_ll_threaded(Array, Array) -> Array
convert_etrs89_to_ll_threaded(Array, Array) -> Array
convert_etrs89_to_osgb36_threaded(Array, Array) -> Array
convert_osgb36_to_etrs89_threaded(Array, Array) -> Array
convert_epsg3857_to_wgs84_threaded(Array, Array) -> Array
FFI and Memory Management
If your library, module, or script uses the FFI functions, it must implement drop_float_array. Failing to do so may result in memory leaks. It has the following signature: drop_float_array(ar1: Array, ar2: Array)
The Array structs you pass to drop_float_array must be those you receive from the FFI function. For examples, see the Array struct and tests in ffi.rs, and the _FFIArray class in convertbng.
Building the Shared Library
Running cargo build --release will build an artefact called liblonlat_bng.dylib on OSX, and liblonlat_bng.a on *nix systems. Note that you'll have to generate liblonlat_bng.so for *nix hosts using the following steps:
ar -x target/release/liblonlat_bng.agcc -shared *.o -o target/release/liblonlat_bng.so -lrt
As a Python Package
convert_bng is available from PyPI for OSX and *nix:
pip install convertbng
More information is available in its repository
Benchmark
A CProfile benchmark was run, comparing 50 runs of converting 1m random lon, lat pairs in NumPy arrays.
Methodology
- 4 Amazon EC2 C4 (compute-optimised) systems were tested
- The system was first calibrated by taking the mean of five calibration runs of 100,000 repeats
- A benchmark program was then run for each of the three configurations. See the benches directory for details
- The five slowest function calls for each benchmark were then displayed.
Results
| EC2 Instance Type | Processors (vCPU) | Rust Ctypes (s) | Rust Cython (s) | Pyproj (s) | % change, Ctypes vs Pyproj | % change, Pyproj vs Cython |
|---|---|---|---|---|---|---|
| c4.xlarge | 4 | 42.075 | 27.964 | 18.73 | 124.64% | -33.02% |
| c4.2xlarge | 8 | 28.743 | 14.094 | 19.055 | 50.84% | 35.20% |
| c4.4xlarge | 16 | 22.108 | 7.554 | 18.797 | 17.61% | 148.84% |
| c4.8xlarge | 36 | 18.288 | 4.42 | 18.285 | 0.02% | 313.69% |
Conclusion
Using multithreading gives excellent performance; Pyproj – which is a compiled Cython binary – is less than 20% faster than Rust + Ctypes on a 16-CPU system, and gives identical performance on 36 CPUs.
A compiled Cython binary + Rust is faster than Pyproj on an 8-CPU system, and outperforms Pyproj by greater margins as the number of CPUs increase: at 36 CPUs, it is over 300% faster.
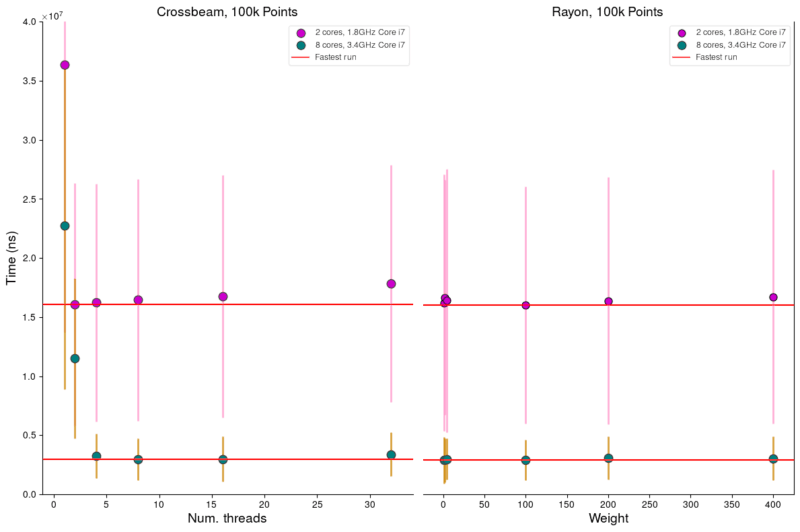
Comparing Crossbeam and Rayon
Comparing how varying threads and weights affects overall speed, using cargo bench
On both 2- and 8-core i7 machines, running convert_bng_threaded_vec using one thread per core gives optimum performance, whereas Rayon does a good job at choosing its own optimum weight.
License
This software makes use of OSTN02 data, which is © Crown copyright, Ordnance Survey and the Ministry of Defence (MOD) 2002. All rights reserved. Provided under the BSD 2-clause license.
† Really, pyproj?

Dependencies
~17MB
~425K SLoC