24 releases (1 stable)
| 1.0.0 | Mar 24, 2025 |
|---|---|
| 0.4.13 | Feb 21, 2025 |
| 0.4.9 | Sep 10, 2024 |
| 0.4.8 | Apr 12, 2024 |
| 0.1.3 | Nov 28, 2022 |
#11 in Geospatial
7,390 downloads per month
Used in 5 crates
370KB
443 lines
tzf-rs: a fast timezone finder for Rust. 

[!NOTE]
This package uses simplified shape data so it is not entirely accurate around the border.
- Released documentation: docs.rs/tzf-rs
- Latest documentation(not released yet): ringsaturn.github.io/tzf-rs
- Try it online: tzf-web
Build options
By default, the binary is built as well. If you don't want/need it, you can omit the default features and build like this:
cargo build --no-default-features
Or add in the below way:
cargo add tzf-rs --no-default-features
Best Practices
It's expensive to init tzf-rs's Finder/FuzzyFinder/DefaultFinder, so
please consider reusing instances or creating one as a global variable. Below is
a global variable example:
use lazy_static::lazy_static;
use tzf_rs::DefaultFinder;
lazy_static! {
static ref FINDER: DefaultFinder = DefaultFinder::new();
}
fn main() {
print!("{:?}\n", FINDER.get_tz_name(116.3883, 39.9289));
print!("{:?}\n", FINDER.get_tz_names(116.3883, 39.9289));
}
For reuse,
racemap/rust-tz-service provides
a good example.
A Redis protocol demo could be used here:
ringsaturn/redizone.
Performance
The tzf-rs package is intended for high-performance geospatial query services,
such as weather forecasting APIs. Most queries can be returned within a very
short time, averaging around 3,000 nanoseconds (about 1,000ns slower than with
Go repo tzf. I will continue improving this - you can track progress
here).
Here is what has been done to improve performance:
- Using pre-indexing to handle most queries takes approximately 1000 nanoseconds.
- Using a finely-tuned Ray Casting algorithm package
ringsaturn/geometry-rsto verify whether a polygon contains a point.
That's all. There are no black magic tricks inside the tzf-rs.
Below is a benchmark run on global cities(about 14K), and avg time is about 3,000 ns per query:
// require toolchain.channel=nightly
#![feature(test)]
#[cfg(test)]
mod benches_default {
use tzf_rs::DefaultFinder;
extern crate test;
use test::Bencher;
#[bench]
fn bench_default_finder_random_city(b: &mut Bencher) {
let finder: DefaultFinder = DefaultFinder::default();
b.iter(|| {
let city = cities_json::get_random_cities();
let _ = finder.get_tz_name(city.lng, city.lat);
});
}
}
test benches_default::bench_default_finder_random_city ... bench: 1,220.19 ns/iter (+/- 54.36)
| Criterion result | Pic |
|---|---|
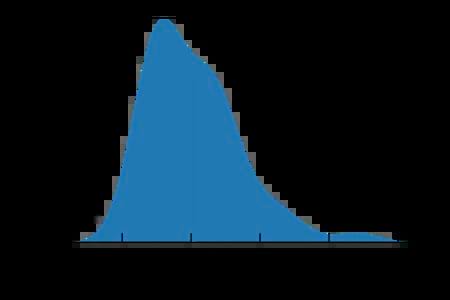 |
|
| Regression | 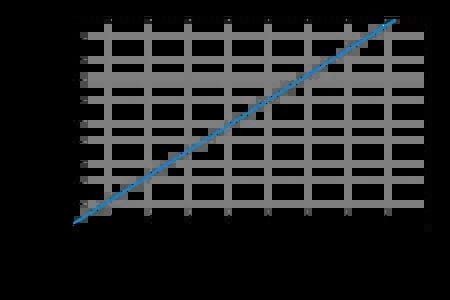 |
You can view more details from latest benchmark from GitHub Actions logs.
References
I have written an article about the history of tzf, its Rust port, and its
Rust port's Python binding; you can view it
here.
- Original Go repo:
ringsaturn/tzf - Binary timezone data:
ringsaturn/tzf-rel - Geometry: use
ringsaturn/geometry-rswhich istidwall/geometry's Rust port. - Continuous Benchmark compared with other packages:
ringsaturn/tz-benchmark
Bindings
- Ruby, see
HarlemSquirrel/tzf-rb - Python, see
ringsaturn/tzfpy - Wasm, see
ringsaturn/tzf-wasm
Command line
The binary helps in debugging tzf-rs and using it in (scripting) languages without bindings. Either specify the coordinates as parameters to get a single time zone, or to look up multiple coordinates efficiently specify the ordering and pipe them to the binary one pair of coordinates per line.
tzf --lng 116.3883 --lat 39.9289
echo -e "116.3883 39.9289\n116.3883, 39.9289" | tzf --stdin-order lng-lat
LICENSE
This project is licensed under the MIT license. The data is
licensed under the
ODbL license, same as
evansiroky/timezone-boundary-builder
Dependencies
~13MB
~63K SLoC