35 breaking releases
| 0.36.0 | Mar 23, 2025 |
|---|---|
| 0.34.0 | Feb 4, 2025 |
| 0.32.0 | Dec 16, 2024 |
| 0.30.0 | Nov 18, 2024 |
| 0.6.0 | Jul 18, 2023 |
#26 in Geospatial
42,196 downloads per month
Used in 5 crates
(2 directly)
84KB
1.5K
SLoC
Walkers, a map widget for Rust
![]()
Walkers is a slippy maps widget for egui, similar to very popular Leaflet, but written in Rust. It compiles to native applications as well as WASM. See the online demo here.
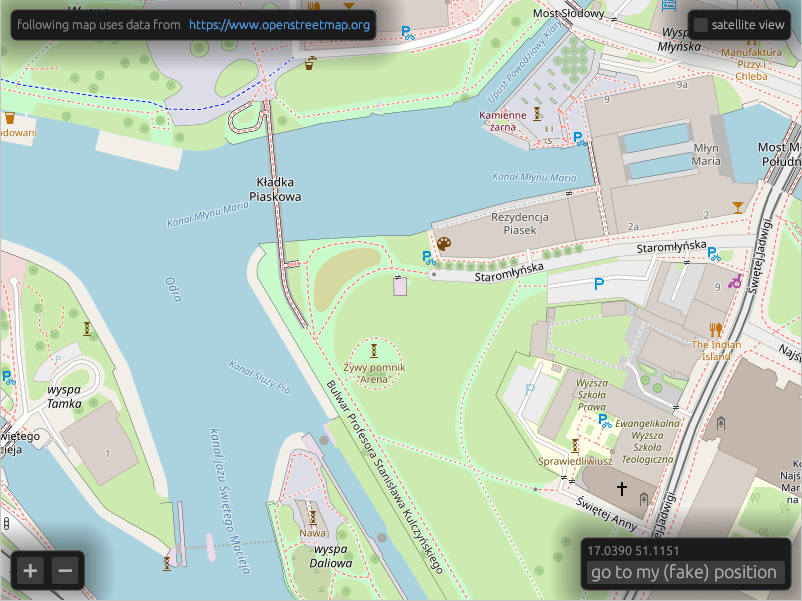
It supports OpenStreetMap, mapbox, and compatible tile servers.
Before deploying your application, please get yourself familiar with the OpenStreetMap usage policy, and consider donating the OpenStreetMap Foundation.
Quick start
Walkers has three main objects. Tiles downloads images from a tile map provider
such as OpenStreetMap and stores them in a cache, MapMemory keeps track of
the widget's state and Map is the widget itself.
use walkers::{HttpTiles, Map, MapMemory, Position, sources::OpenStreetMap, lon_lat};
use egui::{Context, CentralPanel};
use eframe::{App, Frame};
struct MyApp {
tiles: HttpTiles,
map_memory: MapMemory,
}
impl MyApp {
fn new(egui_ctx: Context) -> Self {
Self {
tiles: HttpTiles::new(OpenStreetMap, egui_ctx),
map_memory: MapMemory::default(),
}
}
}
impl App for MyApp {
fn update(&mut self, ctx: &Context, _frame: &mut Frame) {
CentralPanel::default().show(ctx, |ui| {
ui.add(Map::new(
Some(&mut self.tiles),
&mut self.map_memory,
lon_lat(17.03664, 51.09916)
));
});
}
}
You can see a more complete example here.
Running demos
Walkers supports numerous build options, such as Android and WASM. They all share
a common library - demo, but require a different build workflow, not
necessarily compatible with Cargo alone.
Native
To enable mapbox layers, you need to define MAPBOX_ACCESS_TOKEN environment
variable before building. You can obtain one, by creating a
mapbox account.
cd demo_native
cargo run
Web / WASM
cd demo_web
trunk serve --release
Android
You need to have Android SDK and cargo-ndk installed.
cd demo_android
make run-on-device
Dependencies
~16–28MB
~443K SLoC