5 releases
| 0.0.4 | Jul 14, 2019 |
|---|---|
| 0.0.3 | May 3, 2019 |
| 0.0.2 | Apr 19, 2019 |
| 0.0.1 | Apr 18, 2019 |
| 0.0.0 | Apr 18, 2019 |
#615 in Machine learning
7.5MB
21K
SLoC
Contains (ELF exe/lib, 78KB) Triangle_v1_6/showme
Briefing
Sample Based Motion Planning.
This project is intended as educational replication of several general ideas:
- Sparseness
- Motion Primitives
- Importance Sampling
A sub-goal of this project is to integrate and leverage benefits of several of these ideas in a hybrid solution.
Inputs to program
- system dynamics and various constraints are supplied as functions
- environment obstacles
What's in it:
- Sparseness
- Stable Sparse RRT (https://www.cs.rutgers.edu/~kb572/pubs/stable_sparse_rrt_WAFR14_LLB.pdf)
- approximate nearest neighbour with stochastic search
- Motion Primitives:
- lookup for feasible control for steering toward a direction (https://arxiv.org/pdf/1809.02399.pdf)
- compile flag for enabling its use
- adapted for run-time lookup filling
- non-grid based greedy goal-neighbourhood search
- Importance Sampling:
- adaptive sampling (https://journals.sagepub.com/doi/pdf/10.1177/0278364912444543)
- used for trajectory optimization with a given fitness function
Writeups, Benchmarks, etc..
Running Planner
- prerequisites
- install Rust: https://rustup.rs/
- internet connection (building project pulls in software dependencies)
- Make (to build triangulation tool if using custom maps, or obtain executable at: https://www.cs.cmu.edu/~quake/triangle.html)
- build and run in release mode
- Either:
- have custom maps already generated (see Generating Custom Maps section)
- cargo run --release --bin planner -- -p <problem_instance_name> (other program arguments...)
- see prob_instances.rs for predefined problem domain list
- Or:
- cargo run --release --bin planner -- -o <file_obstacle> (other program arguments...)
- sample obstacle file: obstacles/obs3.txt (randomly generated boxes)
- Or:
- have custom maps already generated (see Generating Custom Maps section)
- cargo run --release --bin planner -- -e <.ele file path> -n <.node file path> (other program arguments...)
- eg: cargo run --release --bin planner -- -e maps_custom/dragon_age/poly/ost100d.1.ele -n maps_custom/dragon_age/poly/ost100d.1.node -p orz000d -i 1000000 -b 300 -m dubins
- would need to modify dynamics model file to change goal states, etc.
- see custom maps section for .ele and .node details
- Either:
- optional arguments:
- -w: show witness node and witness representative pairs
- drawn as a line(red) with end points (purple: witness), (blue: witness representative)
- -i <N>: max iterations
- -m <model>: dynamical model selection (see src/dynamics_* files)
- variants: dubins, airplane (defaults to dubins)
- -b <N>: batch N iterations in between rendering calls
- -h: help
- -w: show witness node and witness representative pairs
- optional compile-time features:
- usage:
- cargo run --release --bin planner --features nn_naive,disable_pruning,(other features...) -- -p <problem_instance_name> (other program arguments...)
- variants: see [features] section of Cargo.toml for the list
- usage:
- sample program:
- cargo run --release --bin planner --features nn_sample_log,state_propagate_sample,path_optimize -- -p obs3 -m dubins -i 1000000 -b 200
Generating Random Obstacles (a couple obstacles exists in obstacles/ folder)
- build and run in release mode with: cargo run --release --bin gen_obs -- -f <output_file_path>
- required arguments:
- -f <output_file_path> (eg: cargo run --release --bin gen_obs -- -f obstacles/obs99.txt)
- optional arguments:
- -n <N>: number of obstacles to be generated (default: 30)
- optional features:
- gen_obs_3d: generate boxes for in 3D domain (defaults to planar domain)
Using Random Obstacles
- cargo run --release --bin planner -- -o <file_obstacle>
- -o <file_obstacle>: obstacle file path (eg: -o obstacles/obs2.txt)
Generating Custom Maps (need to run this once in order to use custom maps):
- a set of maps that is mainly used for benchmarking purposes obtainable from https://www.movingai.com/benchmarks/grids.html can be used, these are located in the /maps_custom folder
- character movable space within a map are triangulated for use in the planner as the configuration free space
- triangulation is done using the awesome Triangle software from http://www.cs.cmu.edu/~quake/triangle.html
- the maps are converted into a format for Triangle to process and output is loadable into our planner and further extruded as triangular prisms for use with a general purpose 3D obstacle detector, these intermediate files are stored at /maps_custom//poly
- some maps might have bad triangulation not useable for the planner (I aimed for working with Dragon Age maps)
- generating intermediate files and map assets for our planner
- 1st, compile Triangle
- cd Triangle_v1_6
- make
- 2nd, run ./script_map2poly.sh (generates formatted file for Triangle, may take a while)
- 3rd, run ./script_triangulate_poly.sh (outputs 2D triangulation result as .ele and .node files)
- all set for use...
- 1st, compile Triangle
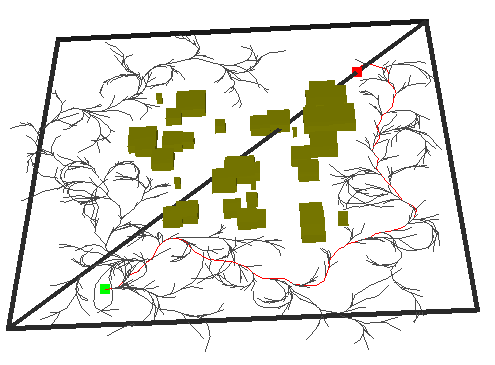
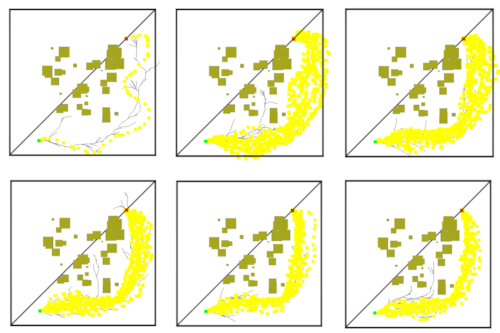
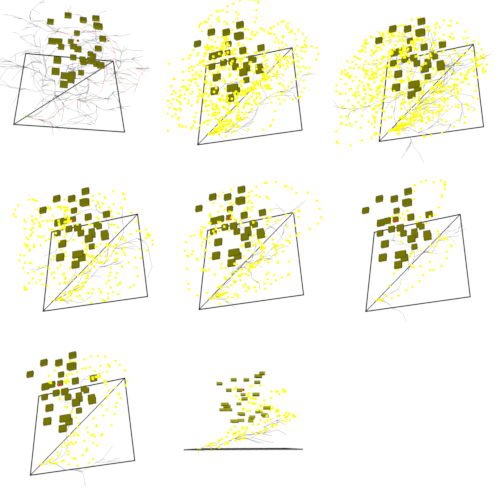
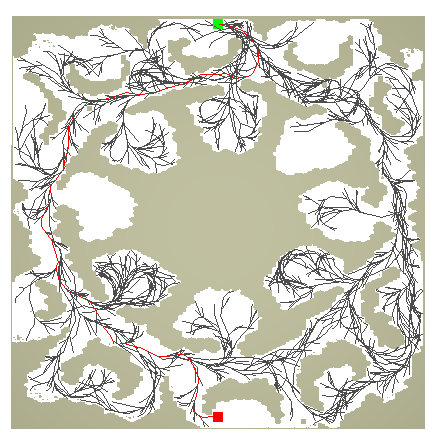
Screenshots
Simple Environments
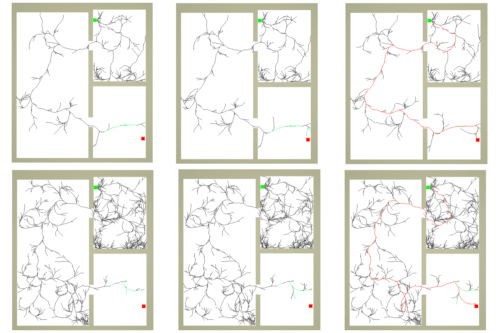
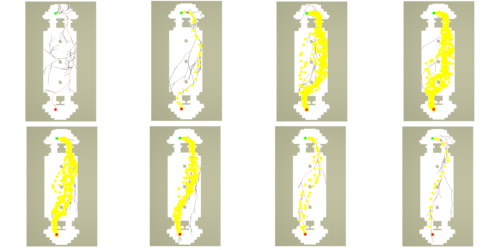
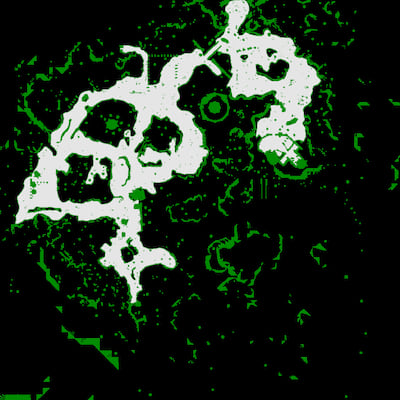
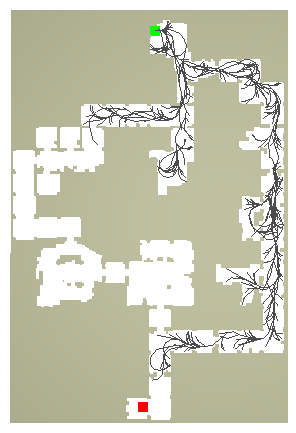
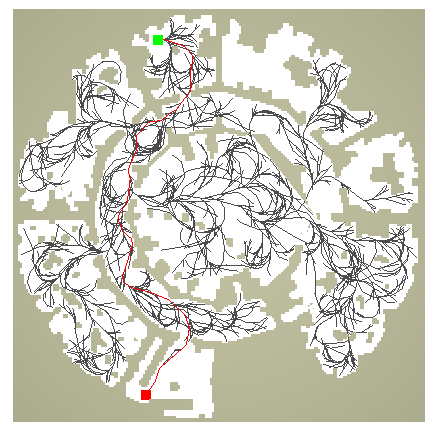
Hard Game Maps

Dependencies
~21–31MB
~471K SLoC