1 unstable release
| 0.1.0 | Jan 19, 2025 |
|---|
#298 in Robotics
1.5MB
780 lines
SCurve Motion Library
This library provides an S-curve motion profile computation framework with configurable jerk (acceleration ramp), acceleration, velocity, and distance constraints. It's designed to be both flexible and efficient, making it suitable for embedded systems, robotics, CNC controllers, and various motion control applications where smooth trajectory generation is required.
WARNING: The provided code may still contain errors and might not function correctly in some cases.
If you discover any errors, please let me know so that the code can be further improved.
Overview
An S-curve motion profile is a trajectory planning strategy that smoothly transitions acceleration (and hence velocity) over time. Instead of abrupt (piecewise-constant) acceleration, an S-curve incorporates jerk-limited ramps, significantly reducing mechanical stress, wear, and vibration.
Why Use an S-curve?
-
Reduced Vibration and Mechanical Stress
By limiting jerk (the rate of change of acceleration), the system transitions between different velocity phases more smoothly. This helps prolong the lifetime of mechanical components, bearings, and motors because high accelerations are introduced gradually instead of instantaneously. -
Better Control at High Speeds
When moving at high velocities, abrupt changes in acceleration can cause instability or resonance. An S-curve approach prevents such instabilities. -
Increased Precision
Smooth trajectories enable more precise positioning, which is crucial in applications such as 3D printers, CNC routers, and robotic arms.
Key Features
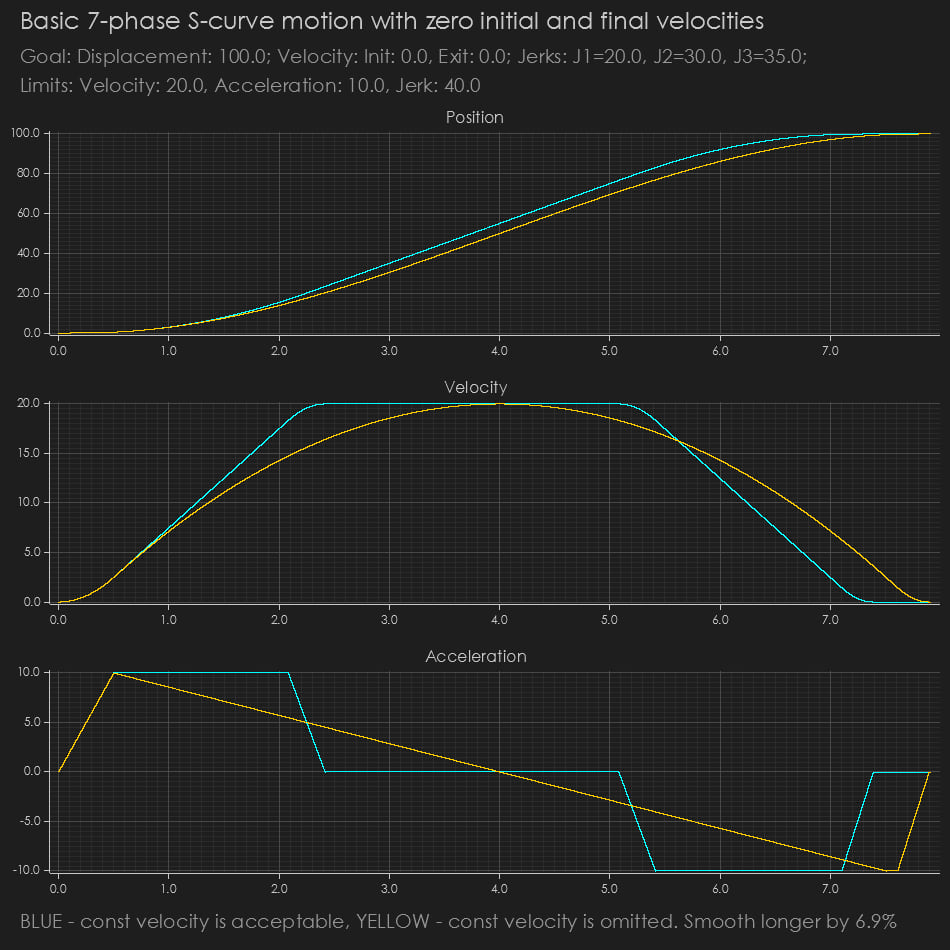
Exclude the Constant Velocity Phase
You can choose to not include a constant velocity phase (const_vel = false). Doing so may reduce vibrations and mechanical resonances if constant cruising is not needed (or if your travel distance is short). However, it may affect the overall travel time.
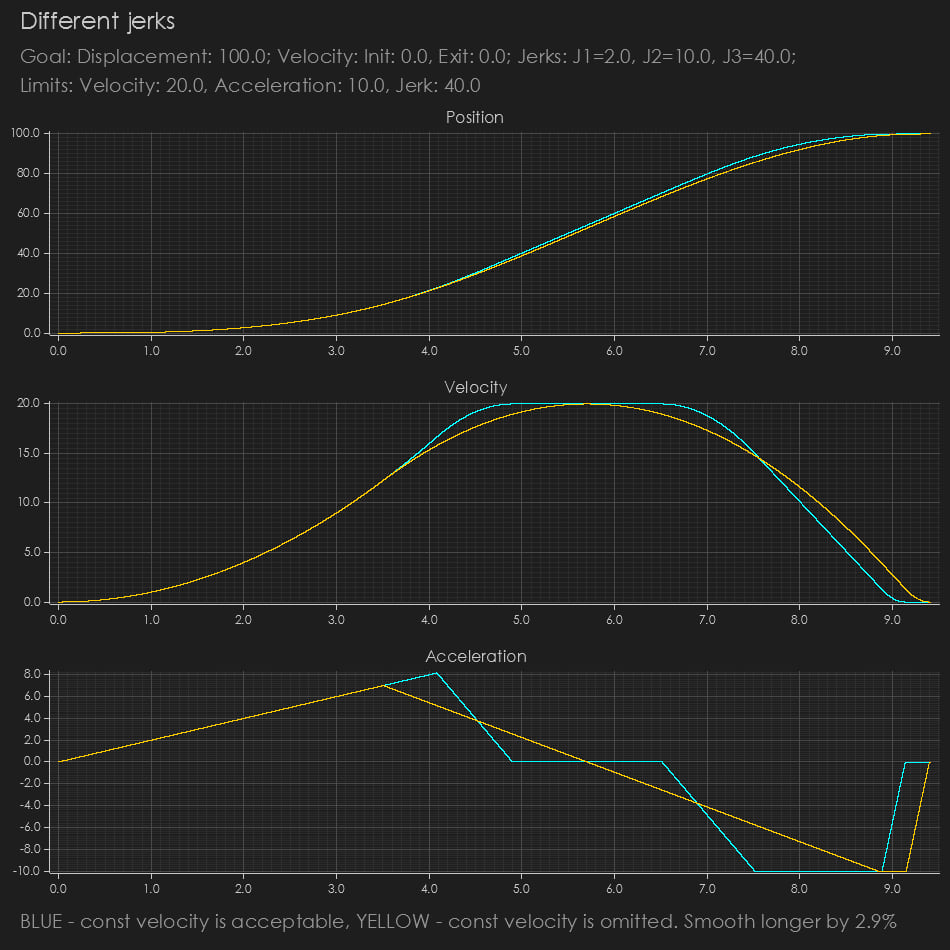
Individually Tunable Jerks
You can specify three jerk values:
- jinit for the initial velocity change,
- jmid for cruising or smoothing around the maximum velocity phase,
- jexit for the final velocity change.
This level of customization helps handle specific start/stop conditions separately from the mid-phase.
NOTE: When avoiding constant velocity, the algorithm may reduce jmid.
WARNING: If positive motion is required and the delta velocity is impossible to achieve with the provided jinit and jexit, these values will be proportionally scaled to fit within the target velocity delta and the required position change. However, they will be constrained by JLIM.
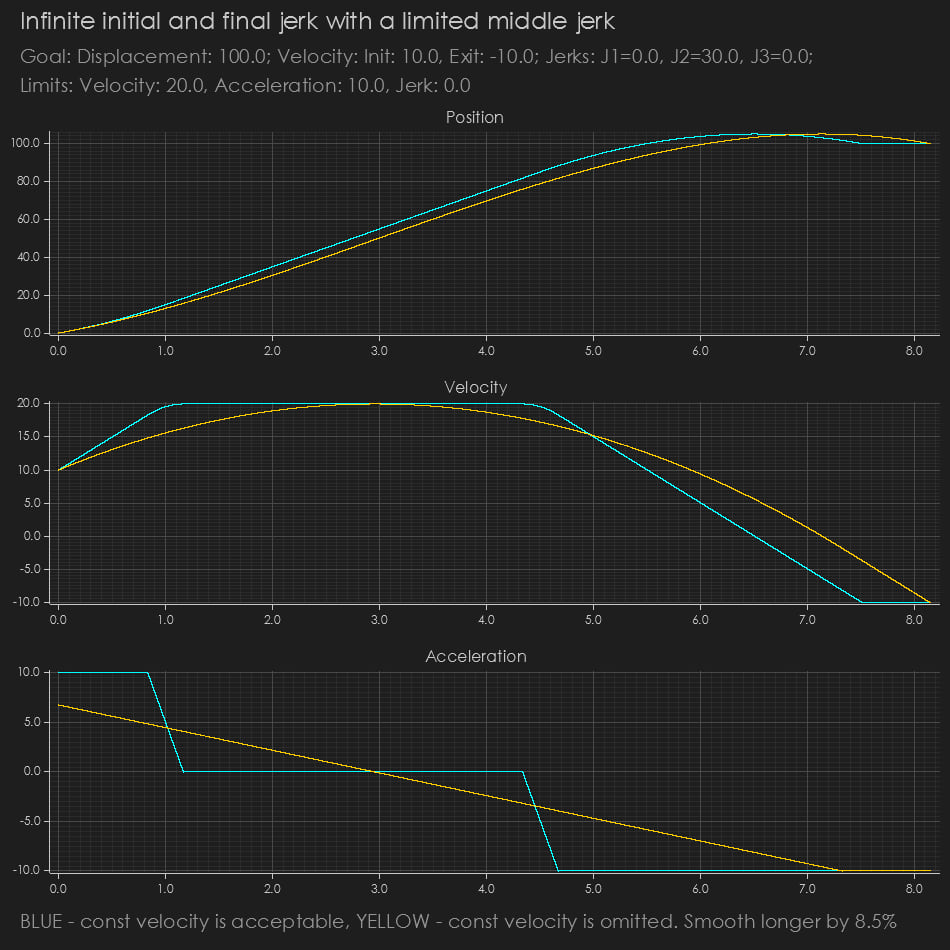
Supports Infinite Values
For certain combined profiles—like classical constant acceleration with minor jerk smoothing at high speeds—you can effectively set jerk to very large (“infinite”) or zero values to simulate an instant change. However, the jerk value will be constrained by JLIM.
Similarly, for velocity and acceleration, if you don't care about the maximum velocity or acceleration, you can simply set them to f64::INFINITY or zero values. This will exclude the phases of constant acceleration or constant velocity.
NOTE: At least one of ALIM or JLIM should be a real limit. Otherwise, the mathematics will be unstable.
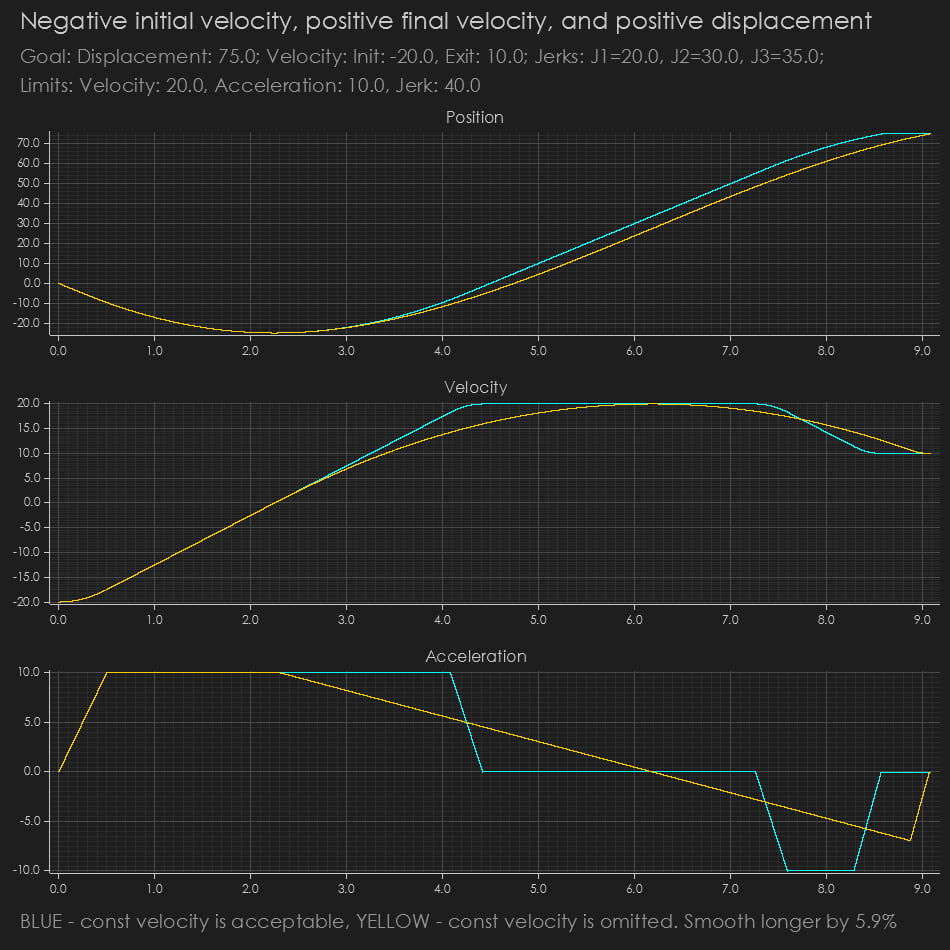
Works with Both Positive and Negative Velocities
The code handles any sign of displacement (e.g., moving in reverse or forward) independently of the sign of the velocity. This means you can start or end at a negative velocity even if the distance to travel is positive. This feature may be useful in cases where a smooth and fast velocity change is required.
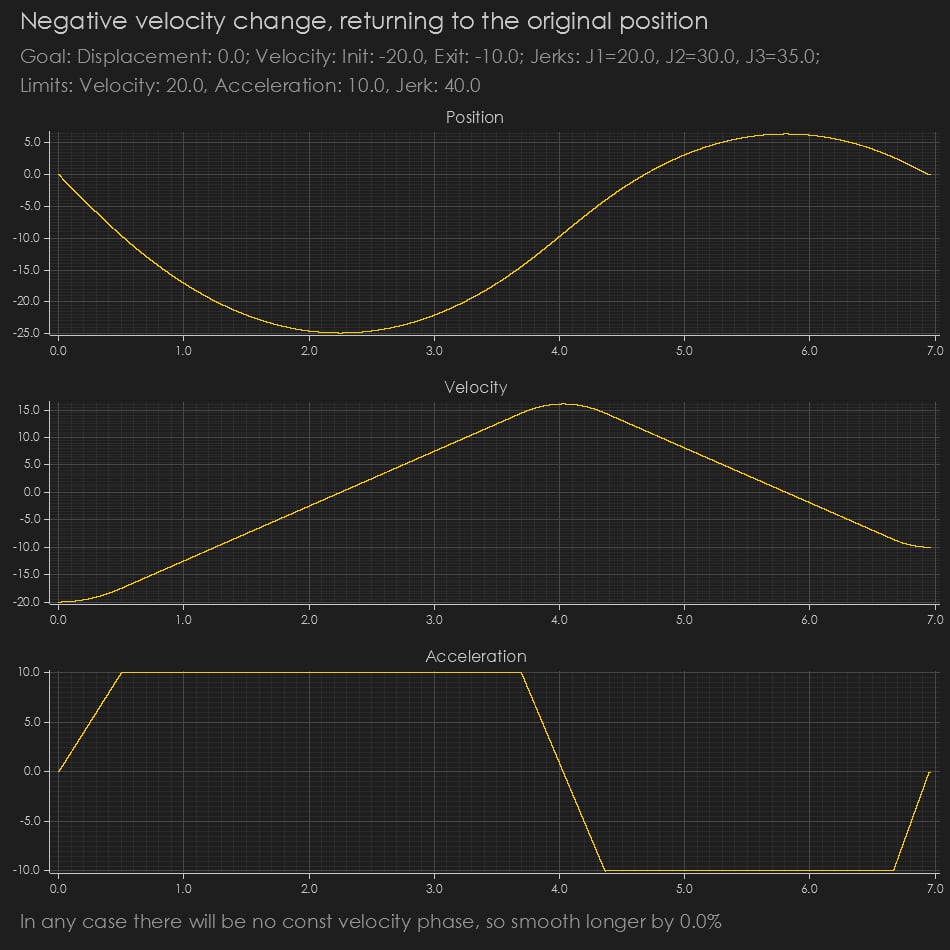
NOTE: Negative initial or exit velocity with positive displacement, or positive velocities with negative displacement, will cause position overshoot.
Support Zero Displacement if Initial and/or Exit Velocities Are Negative
Enables handling negative initial and final velocities even when the displacement is zero.
Configurable Limits
Velocity, acceleration, and jerk limits are easily set. This can help with hardware compliance or ensure you never exceed your motor/drive constraints.
Compute Coefficients Offline
The code is structured so you can perform all the heavy-lifting calculations (binary searches, polynomial fitting) ahead of time in a more powerful environment and then use the resulting coefficients in an embedded system. This separation of concerns is extremely helpful for real-time constraints on microcontrollers with limited resources.
Deep Dive into the Math
The core idea behind an S-curve is that jerk (the derivative of acceleration) remains limited to some maximum magnitude. Over each phase, acceleration changes linearly with time:
$$ \begin{aligned} \text{acc}(t) &= a_0 + j \cdot t,\ \text{vel}(t) &= \int \text{acc}(\tau), d\tau = v_0 + a_0 \cdot t + \frac{j \cdot t^2}{2},\ \text{pos}(t) &= \int \text{vel}(\tau), d\tau = s_0 + v_0 \cdot t + \frac{a_0 \cdot t^2}{2} + \frac{j \cdot t^3}{6} \end{aligned} $$
Within the code, we split the total motion into up to 7 phases (some phases may collapse if not required):
- Acceleration ramp up from (v0) (initial velocity)
- Acceleration constant (if needed)
- Acceleration ramp down to cruising velocity (vlim)
- Constant velocity (optional, can be skipped if const_vel = false)
- Acceleration ramp up toward final velocity segment
- Acceleration constant (if needed)
- Acceleration ramp down to (v1) (final velocity)
Velocity Change Calculations
To perform these calculations, the single function calc_dv_shift_t_s_a is mainly used.
- It computes the minimum time and distance needed for transitioning from vinit to vexit, under a given jerk limit in the initial and exit phases, while respecting the alimit
- The function breaks the velocity change into 3 phases:
- Jerk from jinit (ramping acceleration up or down)
- (Optional) constant acceleration if the peak acceleration hits acc_lim
- Jerk from jexit (ramping acceleration back down)
To do so, a few steps are needed:
- Compute velocity difference = |vinit - vexit|
- Calculate the case when the acceleration limit is effectively not present (the case of absence of a constant acceleration phase) and estimate the time needed in the jerk-up phase T_JINIT and jerk-down phase T_JEXIT from the condition that total velocity change sums to velocity difference
$$ t_{j_{\text{init}}} = \sqrt{\frac{2 \cdot \Delta v \cdot j_{\text{exit}}}{j_{\text{init}} \cdot (j_{\text{init}} + j_{\text{exit}})}},~~~ t_{j_{\text{exit}}} = \sqrt{\frac{2 \cdot \Delta v \cdot j_{\text{init}}}{j_{\text{exit}} \cdot (j_{\text{init}} + j_{\text{exit}})}} $$
- If the calculated peak acceleration exceeds
acc_lim, the code clamps it toacc_limand introduces a timet_a_constfor the constant-acceleration phase. - Integrate polynomials to find exact position and velocity at each sub-phase.
- Then calculate the total time, total distance, and final acceleration amax used in the constant phase (if any).
This approach can be extended to handle sign changes (for negative velocities) by analyzing the sign of dV and applying the correct direction factor.
Binary Search for Fine-Tuning
For more complex scenarios — like reaching a middle velocity less than Vlim or adjusting the middle jerk Jmid — we employ binary searches (e.g., fit_j_mid, fit_v_max). We iteratively test candidate jerk or velocity values, compute the resulting distance/time, and compare it to the desired distance to converge on a solution within a given tolerance.
License
Copyright 2025 by Anton Khrustalev, CREAPUNK, http://creapunk.com
Licensed under the Apache License, Version 2.0 (the "License")