6 releases (stable)
| 1.0.4 | Apr 6, 2024 |
|---|---|
| 1.0.3 | Dec 31, 2023 |
| 1.0.2 | Jan 16, 2023 |
| 1.0.1 | Jul 12, 2022 |
| 0.4.0 | Jul 12, 2022 |
#117 in Command line utilities
282 downloads per month
290KB
6K
SLoC

Prerequisites
Platform requirements
x86_64-unknown-linux-gnu(1)x86_64-unknown-linux-musl
(1) note: glibc version >= 2.35
Build requirements
-
for users install
cargostable latest build system (seerust-toolchain.tomlfor stable version) -
for devels install
rustupthat will automatically provision the correct toolchainFor unit tests coverage
cargo-tarpaulinis required as additional componentThere is an handy
makefileuseful to:- preview documentation built with
rustdoc - preview html code coverage analysis created with
cargo-tarpaulin - create demo animations
- preview documentation built with
Installation
From binary
Install from binary:
curl -sSf https://andros21.github.io/rustracer/install.sh | bash (2)
click to show other installation options
## Install the latest version `gnu` variant in `~/.rustracer/bin`
export PREFIX='~/.rustracer/'
curl -sSf https://andros21.github.io/rustracer/install.sh | bash -s -- gnu
## Install the `0.4.0` version `musl` variant in `~/.rustracer/bin`
export PREFIX='~/.rustracer/'
curl -sSf https://andros21.github.io/rustracer/install.sh | bash -s -- musl 0.4.0
(2) note: will install latest musl release in ~/.local/bin
From source
Install from source code, a template could be:
cargo install rustracer (3)
click to show other installation options
## Install the latest version using `Cargo.lock` in `~/.rustracer/bin`
export PREFIX='~/.rustracer/'
cargo install --locked --root $PREFIX rustracer
## Install the `0.4.0` version in `~/.rustracer/bin`
export VER='0.4.0'
export PREFIX='~/.rustracer/'
cargo install --root $PREFIX --version $VER rustracer
(3) note: will install latest release in ~/.cargo/bin
Usage
rustracer
| subcommands | description |
|---|---|
| rustracer-convert | convert an hdr image into ldr image |
| rustracer-demo | render a simple demo scene (example purpose) |
| rustracer-render | render a scene from file (yaml formatted) |
| rustracer-completion | generate shell completion script (hidden) |
click to show rustracer -h
a multi-threaded raytracer in pure rust
Usage: rustracer <COMMAND>
Commands:
convert Convert HDR (pfm) image to LDR (ff|png) image
demo Render a demo scene (hard-coded in main)
render Render a scene from file (yaml formatted)
Options:
-h, --help Print help
-V, --version Print version
rustracer-convert
Convert a pfm file to png:
rustracer convert image.pfm image.png
click to show rustracer-convert -h
Convert HDR (pfm) image to LDR (ff|png) image
Usage: rustracer convert [OPTIONS] <HDR> <LDR>
Arguments:
<HDR> Input pfm image
<LDR> Output image [possible formats: ff, png]
Options:
-v, --verbose Print stdout information
-f, --factor <FACTOR> Normalization factor [default: 1.0]
-g, --gamma <GAMMA> Gamma parameter [default: 1.0]
-h, --help Print help (see more with '--help')
-V, --version Print version
rustracer-demo
Rendering demo scene:
rustracer demo --width 1920 --height 1080 --anti-aliasing 3 demo.png (4)
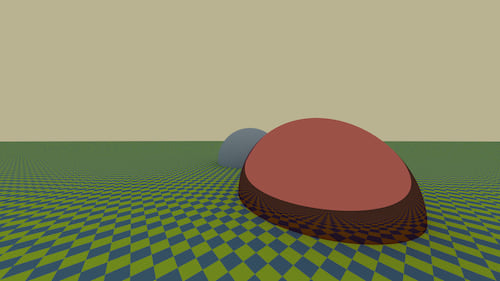
demo.png: cpu Intel(R) Xeon(R) CPU E5520 @ 2.27GHz | threads 8 | time ~35s
demo scene 360 degree (see makefile):
click to show rustracer-demo -h
Render a demo scene (hard-coded in main)
Usage: rustracer demo [OPTIONS] <OUTPUT>
Arguments:
<OUTPUT> Output image [possible formats: ff, png]
Options:
-v, --verbose Print stdout information
--output-pfm Output also hdr image
--orthogonal Use orthogonal camera instead of perspective camera
--width <WIDTH> Image width [default: 640]
--height <HEIGHT> Image height [default: 480]
--angle-deg <ANGLE_DEG> View angle (in degrees) [default: 0.0]
-f, --factor <FACTOR> Normalization factor [default: 1.0]
-g, --gamma <GAMMA> Gamma parameter [default: 1.0]
-a, --algorithm <ALGORITHM> Rendering algorithm [default: pathtracer] [possible values: onoff, flat, pathtracer]
-n, --num-of-rays <NUM_OF_RAYS> Number of rays [default: 10]
-m, --max-depth <MAX_DEPTH> Maximum depth [default: 3]
--init-state <INIT_STATE> Initial random seed (positive number) [default: 42]
--init-seq <INIT_SEQ> Identifier of the random sequence (positive number) [default: 54]
--anti-aliasing <ANTI_ALIASING> Anti-aliasing level [default: 1]
-h, --help Print help (see more with '--help')
-V, --version Print version
(4) note: all available threads are used, set RAYON_NUM_THREADS to override
rustracer-render
Rendering demo scene from scene file examples/demo.yml:
rustracer render --anti-aliasing 3 examples/demo.yml demo.png (5)
you can use this example scene to learn how to write your custom scene, ready to be rendered!
But let's unleash the power of a scene encoded in data-serialization language such as yaml
Well repetitive scenes could be nightmare to be written, but for these (and more) there is cue
Let's try to render a 3D fractal, a sphere-flake, but without manually write a yaml scene file
we can automatic generate it from examples/flake.cue
cue eval flake.cue -e "flake" -f flake.cue.yml # generate yml from cue
cat flake.cue.yml | sed "s/'//g" > flake.yml # little tweaks
wc -l flake.cue flake.yml # compare lines number
92 flake.cue # .
2750 flake.yml # .
so with this trick we've been able to condense a scene info from 2750 to 92 lines, x30 shrink! 😎
and the generated flake.yml can be simple parsed
rustracer render --width 1280 --height 720 --anti-aliasing 3 flake.yml flake.png (5)
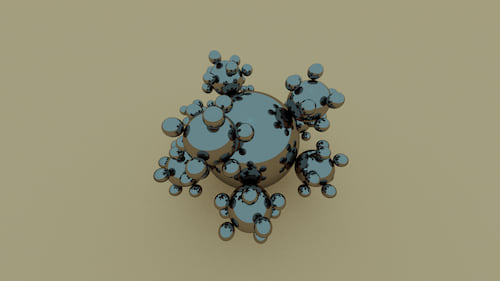
flake.png: cpu Intel(R) Xeon(R) CPU E5520 @ 2.27GHz | threads 8 | time ~7h
click to show rustracer-render -h
Render a scene from file (yaml formatted)
Usage: rustracer render [OPTIONS] <INPUT> <OUTPUT>
Arguments:
<INPUT> Input scene file
<OUTPUT> Output image [possible formats: ff, png]
Options:
-v, --verbose Print stdout information
--output-pfm Output also hdr image
--width <WIDTH> Image width [default: 640]
--height <HEIGHT> Image height [default: 480]
--angle-deg <ANGLE_DEG> View angle (in degrees) [default: 0.0]
-f, --factor <FACTOR> Normalization factor [default: 1.0]
-g, --gamma <GAMMA> Gamma parameter [default: 1.0]
-a, --algorithm <ALGORITHM> Rendering algorithm [default: pathtracer] [possible values: onoff, flat, pathtracer]
-n, --num-of-rays <NUM_OF_RAYS> Number of rays [default: 10]
-m, --max-depth <MAX_DEPTH> Maximum depth [default: 3]
--init-state <INIT_STATE> Initial random seed (positive number) [default: 42]
--init-seq <INIT_SEQ> Identifier of the random sequence (positive number) [default: 54]
--anti-aliasing <ANTI_ALIASING> Anti-aliasing level [default: 1]
-h, --help Print help (see more with '--help')
-V, --version Print version
(5) note: all available threads are used, set RAYON_NUM_THREADS to override
rustracer-completion
Simple generate completion script for bash shell (same for fish and zsh):
rustracer completion bash (6)
note: close-open your shell, and here we go, tab completions now available!
click to show rustracer-completion -h
Generate shell completion script
Usage: rustracer completion [OPTIONS] <SHELL>
Arguments:
<SHELL> Shell to generate script for [possible values: bash, fish, zsh]
Options:
-o, --output <OUTPUT> Specify output script file
-h, --help Print help (see more with '--help')
-V, --version Print version
(6) note: bash>4.1 and bash-complete>2.9
Acknowledgements
- pytracer - a simple raytracer in pure Python
Dependencies
~6–16MB
~230K SLoC