10 releases (5 breaking)
| 0.6.0 | May 6, 2025 |
|---|---|
| 0.5.0 | Apr 7, 2025 |
| 0.4.0 | Jan 5, 2025 |
| 0.3.0 | Sep 8, 2024 |
| 0.1.1 | Mar 29, 2024 |
#103 in Math
133 downloads per month
160KB
2.5K
SLoC
icao-wgs84
![]()
![]()
![]()
![]()
A library for performing geometric calculations on the WGS-84 ellipsoid, see Figure 1.
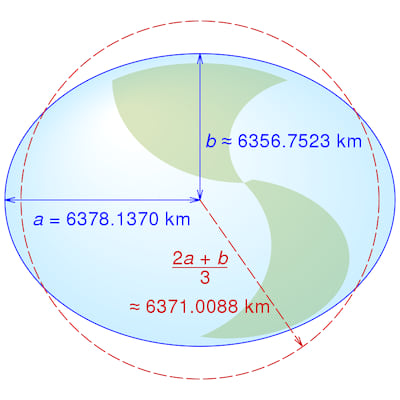
Figure 1 The WGS-84 Ellipsoid (not to scale)
Cmglee, CC BY-SA 4.0, via Wikimedia Commons
WGS-84 has become the de facto standard for satellite navigation since its adoption by the Navstar Global Positioning System (GPS) and the USA making GPS available for civilian use in 1983.
This library uses the WGS-84 primary parameters defined in Table 3-1 of the ICAO WGS-84 Implementation Manual.
Geodesic navigation
The shortest path between two points on the surface of an ellipsoid is a geodesic segment. It is the equivalent of a straight line segment in planar geometry or a great circle arc on the surface of a sphere, see Figure 2.
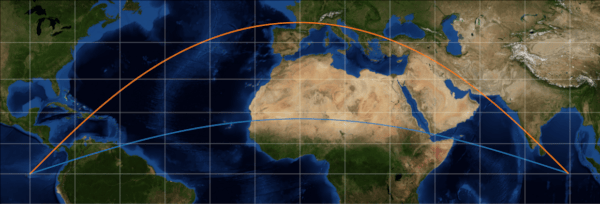
Figure 2 A geodesic segment (orange) and a great circle arc (blue)
This library uses the correspondence between geodesic segments on an ellipsoid and great-circle arcs on a unit sphere, together with 3D vectors to calculate:
- the length and azimuths of a geodesic segment between two positions;
- the along track and across track distances of a point relative to a geodesic segment;
- and the intersection of two geodesic segments.
See: geodesic algorithms.
Design
The library is based on Charles Karney's GeographicLib library.
Like GeographicLib, it models geodesic segments as great circle arcs on
the surface of a unit sphere. However, it also uses vectors to perform
calculations between geodesic segments.
The Ellipsoid class represents an ellipsoid of revolution.
The static WGS84_ELLIPSOID represents the WGS-84 Ellipsoid which is used
by the GeodesicSegment From traits to create GeodesicSegments on the WGS-84 Ellipsoid.
The library depends upon the following crates:
- angle-sc - to define
Angle,DegreesandRadiansand perform trigonometric calculations; - unit-sphere - to define
LatLongand perform great-circle and vector calculations. - icao_units - to define
MetresandNauticalMilesand perform conversions between them.

Figure 3 Class Diagram
The library is declared no_std so it can be used in embedded applications.
Examples
Calculate geodesic initial azimuths and length
Calculate the distance in Nautical Miles and azimuths (a.k.a bearing) in degrees between two positions.
use icao_wgs84::*;
let istanbul = LatLong::new(Degrees(42.0), Degrees(29.0));
let washington = LatLong::new(Degrees(39.0), Degrees(-77.0));
let (azimuth, length, end_azimuth) = calculate_azimuths_and_geodesic_length(&istanbul, &washington, Radians(great_circle::MIN_VALUE), &WGS84_ELLIPSOID);
let distance_nm = NauticalMiles::from(length);
println!("Istanbul-Washington distance: {:?}", distance_nm);
let azimuth_degrees = Degrees::from(azimuth);
println!("Istanbul-Washington initial azimuth: {:?}", azimuth_degrees.0);
let end_azimuth_degrees = Degrees::from(end_azimuth.opposite());
println!("Washington-Istanbul initial azimuth: {:?}", end_azimuth_degrees.0);
Calculate along track and across track distances
Create a GeodesicSegment between two positions and then calculate the
along track and across track distances of a third position relative to the GeodesicSegment.
The example is based on this reply from C. F. F. Karney :
https://sourceforge.net/p/geographiclib/discussion/1026621/thread/21aaff9f/#8a93.
The expected latitude and longitude are from Karney's reply:
Final result 54.92853149711691 -21.93729106604878
Note: the across track distance (xtd) is negative because Reyjavik is on the
right hand side of the GeodesicSegment.
Across track distances are:
- positive for positions to the left of the
GeodesicSegment, - negative for positions to the right of the
GeodesicSegment - and zero for positions within the precision of the
GeodesicSegment.
use icao_wgs84::*;
use angle_sc::is_within_tolerance;
let istanbul = LatLong::new(Degrees(42.0), Degrees(29.0));
let washington = LatLong::new(Degrees(39.0), Degrees(-77.0));
let g1 = GeodesicSegment::from(&istanbul, &washington);
let distance_nm = NauticalMiles::from(g1.length());
println!("Istanbul-Washington distance: {:?}", distance_nm);
let azimuth_degrees = Degrees::from(g1.azimuth(Metres(0.0)));
println!("Istanbul-Washington initial azimuth: {:?}", azimuth_degrees.0);
let reyjavik = LatLong::new(Degrees(64.0), Degrees(-22.0));
// Calculate geodesic segment along track and across track distances to 1mm precision.
let (atd, xtd, iterations) = g1.calculate_atd_and_xtd(&reyjavik, Metres(1e-3));
assert!(is_within_tolerance(3928788.572, atd.0, 1e-3));
assert!(is_within_tolerance(-1010585.9988368, xtd.0, 1e-3));
println!("calculate_atd_and_xtd iterations: {:?}", iterations);
let position = g1.lat_long(atd);
assert!(is_within_tolerance(
54.92853149711691,
Degrees::from(position.lat()).0,
128.0 * f64::EPSILON
));
assert!(is_within_tolerance(
-21.93729106604878,
Degrees::from(position.lon()).0,
2048.0 * f64::EPSILON
));
Also Note: the example uses 1mm precision to match Karney's result.
In practice, precision should be determined from position accuracy.
Higher precision requires more iterations and therefore takes longer to
calculate the result.
Calculate geodesic intersection point
Create two GeodesicSegments, each between two positions and then calculate the
distances from the geodesic segment start points to their intersection point.
The example is based on this reply from C. F. F. Karney :
https://sourceforge.net/p/geographiclib/discussion/1026621/thread/21aaff9f/#fe0a
The expected latitude and longitude are from Karney's reply:
Final result 54.7170296089477 -14.56385574430775
Note: Karney's solution requires all 4 positions to be in the same hemisphere
centered at the intersection point.
This solution does not have that requirement.
use icao_wgs84::*;
use angle_sc::is_within_tolerance;
let istanbul = LatLong::new(Degrees(42.0), Degrees(29.0));
let washington = LatLong::new(Degrees(39.0), Degrees(-77.0));
let reyjavik = LatLong::new(Degrees(64.0), Degrees(-22.0));
let accra = LatLong::new(Degrees(6.0), Degrees(0.0));
let g1 = GeodesicSegment::from((&istanbul, &washington));
let g2 = GeodesicSegment::from((&reyjavik, &accra));
// Calculate the intersection point position
let result = calculate_intersection_point(&g1, &g2, Metres(1e-3));
// Get the intersection point position
let lat_lon = result.unwrap();
assert!(is_within_tolerance(54.7170296089477, lat_lon.lat().0, 1e-6));
assert!(is_within_tolerance(-14.56385574430775, lat_lon.lon().0, 1e-6));
Test
The integration test uses Charles Karney's Test data for geodesics to verify geodesic segment azimuth and distance calculations between positions on the WGS-84 ellipsoid. Run the tests using:
cargo test -- --ignored
Contribution
If you want to contribute through code or documentation, the Contributing guide is the best place to start. If you have any questions, please feel free to ask. Just please abide by our Code of Conduct.
License
icao-wgs84 is provided under a MIT license, see LICENSE.
Dependencies
~4.5MB
~99K SLoC