47 releases (26 stable)
| 3.1.1 | Apr 15, 2025 |
|---|---|
| 3.1.0 | Jan 23, 2025 |
| 3.0.1 | Sep 29, 2024 |
| 2.0.14 | Sep 28, 2024 |
| 0.1.2 |
|
#18 in Graphics APIs
204 downloads per month
Used in 2 crates
635KB
17K
SLoC
Rust D3 Geo
Rust 2021 Edition.
![]()
![]()
![]()
This is a port d3-geo into RUST. It is part of a family of ported d3-modules
- d3_geo_rs
- d3_delaunay_rs
- d3_geo_voronoi_rs
This library allows the development of custom maps. It provides a comprehensive set of projections along with the means to scale rotate and translate the final image. The projector processes polygons, lines and points in the form of GeoJSON objects. Additionally this library can be used to calculate lengths, areas and the centroid of such objects
CHANGELOG.md contains a summary of breaking changes between v1.x, 2.x and 3.x
Version 3.0.0 adds support for WGPU
"WGPU is a pure-rust graphics API. It runs natively on Vulkan, Metal, D3D12, and OpenGL; and on top of WebGL2 and WebGPU on wasm." [wgpu]
When to use the rust version of the library
The limits of the javascript library become obvious when developing interactive applications that process large datasets. For example the examples/globe applications operate on a highly detailed ( 1:50M resolution ) map of the earth. On a laptop this is beyond the javascript version.
| Available Projections | ||
|---|---|---|
| Albers | ConicEqualArea | Gnomic |
| AlbersUsa | Equidistant | Orthographic |
| AzimuthalEqualArea | Equirectangular | Mercator |
| AzimuthalEquiDistant | EqualArea | MercatorTransverse |
| Conformal | EqualEarth | Stereographic |
Examples
These Examples are provided to help developers convert their existing javascript to rust. They can be found in the github repository associated with this crate.
| Description | |
|---|---|
|
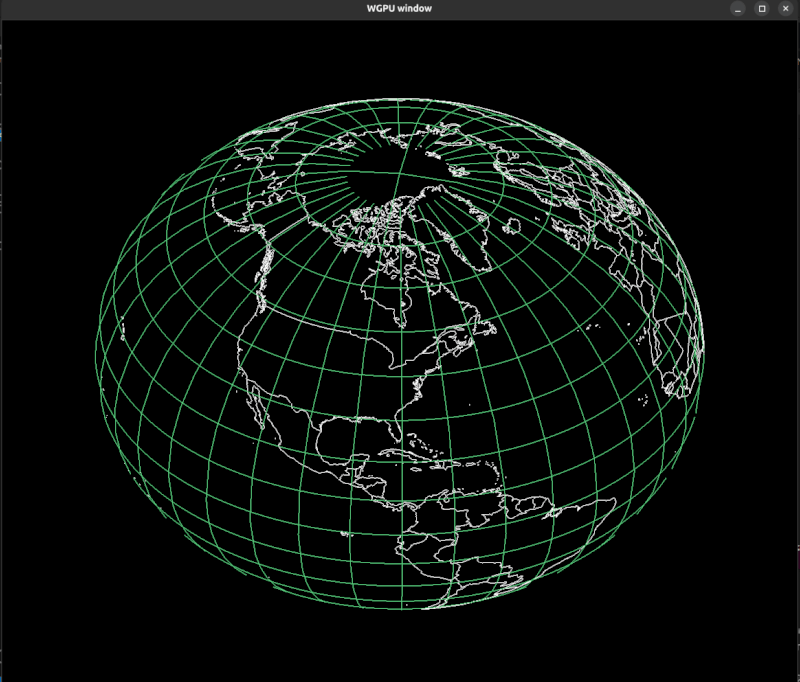
examples/globe/rotating_50m This is a port into rust of this d3-geo example The javascript version compromises by using a low resolution map. Here no such compromise is required. This globe is rendered to a HTML CANVAS element. For performance reasons this example is best viewed by running "npm run build" and then "npm run serve" which compiles the rust code using the --release flag. (Scale 1:50M) |

|
|
examples/globe/rotating_WGPU WGPU support in the browser is partial and currently hidden behind experimental flags. See the browser-WGPU Implementation Status. For now development in this library uses the winit crate to make cross platform application. The promise of this approach is to bypass the bottleneck in passing bulk data from RUST memory space, into javascript, and finally into GPU memory. GeoJson Geometry is streamed through this libraries rendering pipeline into a new PolyLinesWPGU endpoint. This endpoint's output is a (vertex_buffer,index_buffer) pair in the form of blocks of contiguous memory which can be passed directly to the GPU. A thin vertex and fragment shader is then responsible for rendering. The render speed is approximately 3 times faster than the example above. (Scale 1:50M) |
|
|
examples/globe/svg The globe is rendered as a SVG image. SVG are useful when the semantic meaning of the data needs to be preserved. The example shows how to load/parse/display the globe as individual SVG PATH elements. It also includes code samples that generates SVG graticules. (Scale 1:50M) |
|
| examples/globe/drag_and_zoom This globe is rendered to a HTML CANVAS element It deliberately mixes typescript methods with rust.
The typescript is responsible for handling the mouse events and manipulating the quaternion used to calculate the appropriate change in rotation. In a typescript render loop calls to a rust function render the globe.
(Scale 1:50M) |

|
|
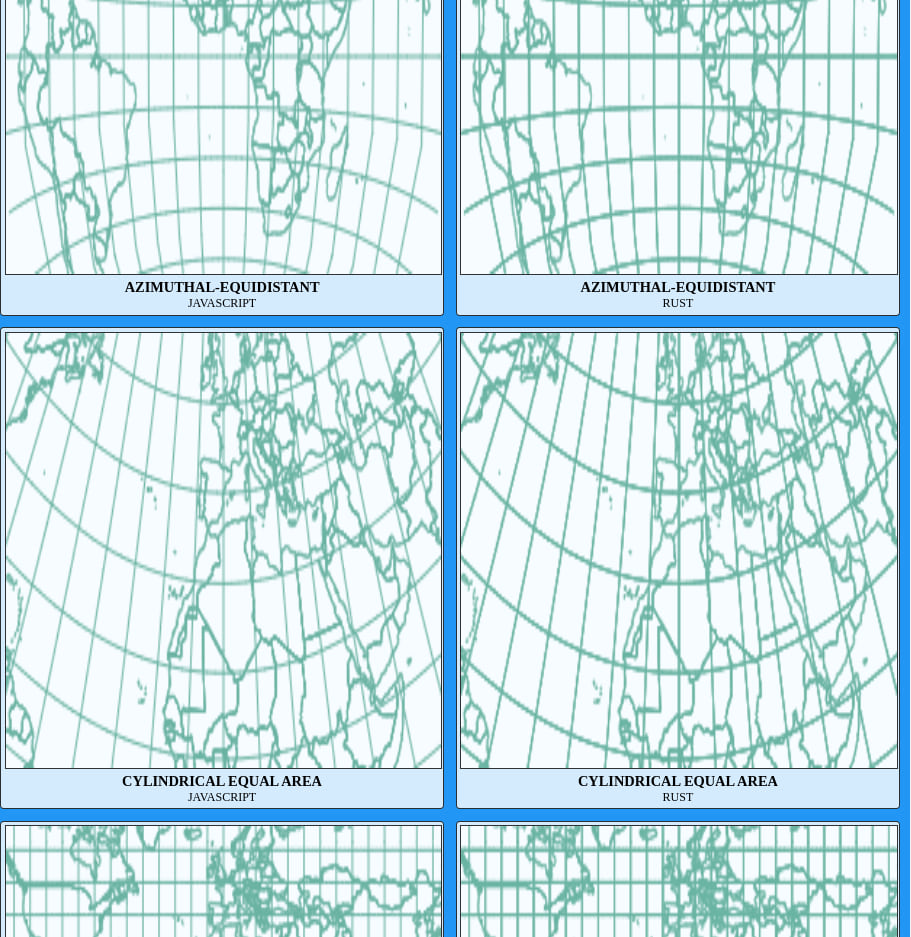
examples/projections All available projections are rendered to a HTML CANVAS element As a confidence building exercise, this demo shows a side by side comparison of the all the projections rendered by in both javascript and rust. (Scale 1:50M) |
|
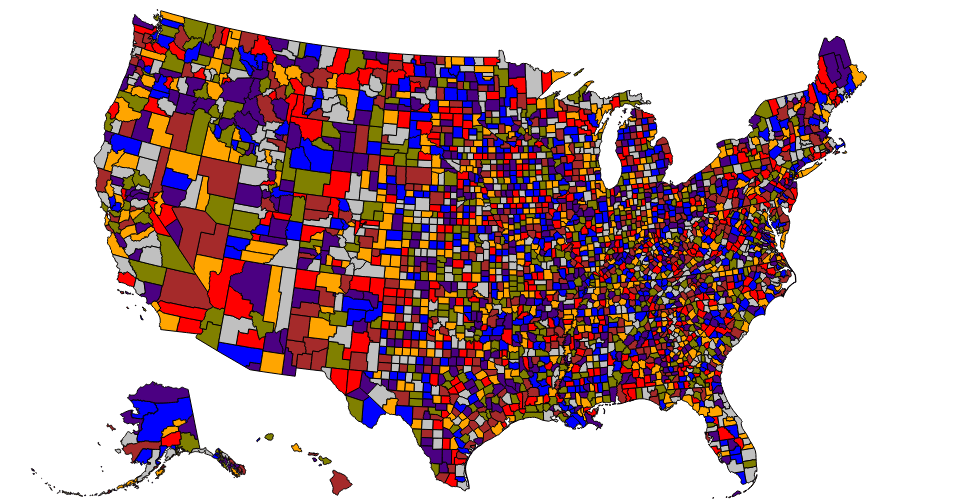
| examples/globe/albers_usa This show all the counties in the USA. AlbersUSA is unlike the other projections. Alaska and Hawaii are rendered as insets. As can be seen in the code a Multi-drain must be used to gather the three projections. (Scale of 1:10M) |
 |
|
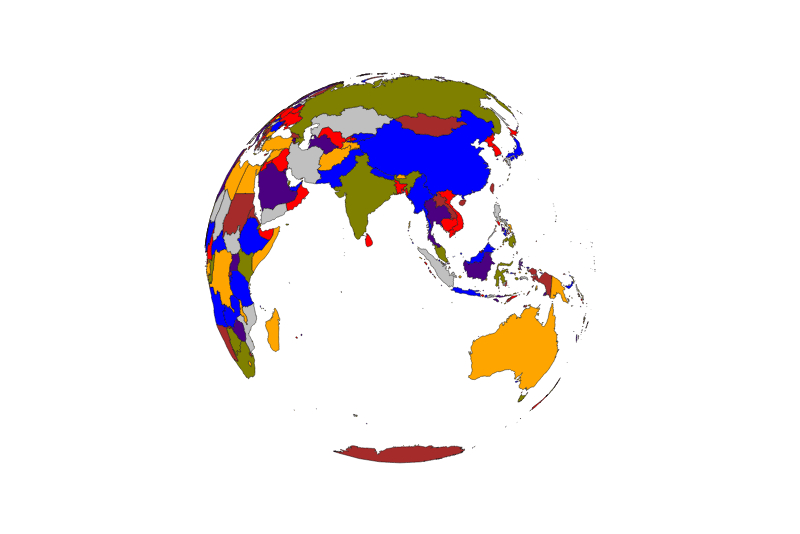
examples/ring SVG example Sample code in both RUST and javascript that renders a complex multi-polygon. ( Orthographic and Stereographic ) |
|
|
examples/multi_threaded Multi threading support is being developed on the v3.x branch It is still highly experimental. This code is intended to be used as a template for native applications ( i.e. NOT for web environments ) Each of the 6 stages runs on a new thread Messages like PolygonStart/LineStart and Point are transmiited into the first stage. After the stream is complete a request in transmitted into the input and a copy of the endpoint is transmitted out of the final stage. |
IMGAE TBD |
An outline of the common steps found in all the examples
-
For a given projection, use its default projection builder, make changes to the scale, translation .. etc, then call build() to construct a projector.
let projector = Stereographic::<f64>::builder() .scale_set(100_f64) .translate_set(&Coord { x: 300_f64, y: 300_f64, }) .clip_angle(90_f64) .precision_set(&10_f64) .build(); -
Construct a PathBuilder
A Path is a collection of nodes where each step on the path transforms the geometry object in some manner.
An object is then streamed along the path.
Here is an overview of the key nodes.
Clipping: Two strategies are used "Antimeridian" and "ClipAngle" [See clip_angle_set() and clip_angle_reset()]
Resampling: Dense geometry can be reduced by declaring a separation distance under which points, used to describe polygons and lines, are considered indistinguishable [See precision_set()]
Bounding: A projection space box can be set, and only geometry within this extent will be displayed. Polygons partially inside the box are restructured to conform to the edges of the box. [See clip_extent_set() clip_extent_clear()]
Endpoints are special path nodes which hold the result of a calculation. A variety of endpoint are available Area, Centroid, Length which can be use to compute properties about polygons or lines. These examples only show endpoints that render to a HTML canvas element or a SVG path element.
When rendering to a HTML canvas the endpoint holds Path2D "rendering context"
// Construct a PathBuilder linked to Path2d // rendering context. let path2d = Path2d::new()?; let endpoint = PathBuilder::new(path2d); let pb = PathBuilder::new(endpoint); let path = pb.build();When generating a SVG image, the endpoint holds a string value from which a PATH element can be constructed.
let pb = PathBuilder::pathstring(); let path = pb.build(); -
Please see the different examples, but the common next step is to construct a PathBuilder object and then to stream a geometry object into it :-
// 'countries' is a geometry extracted from // a world map json file. path.stream(&countries)
Requirements (running the examples)
-
node and npm installation guide
-
wasm-pack installation guide
To view an example application either create a development build, or construct a static-web site as follows
Examples: Start And Run A Development Build
git clone https://github.com/martinfrances107/rust_d3_geo.git
cd rust_d3_geo/examples/ring/
npm install
npm run start
The last command "npm run start" will automatically open your default browser at http:://localhost::8080
Performance: Examples Building A Static Site
Much better performance can be achieved by building a static web site and viewing that directly. At the expense of longer build times the RUST portions of the code a build using the "--release" tags
git clone https://github.com/martinfrances107/rust_d3_geo.git
cd rust_d3_geo/examples/ring
npm install
npm run build
npm run serve
Feature List
-
web (default) This feature allows rendering to a HTML CANVAS element. For CLI binary applications this can be removed to reduce the dependency count.
-
wgpu Allow an endpoint that outputs points and poly-lines as "Array Buffer". This buffer can then be fed direcly in a the GPU reducing the amount system calls. This feature is highly experimental.
Benchmarking
There are two distinct compute environments
-
The browser: Is a highly constrained environment. Here are two equivalent benchmarks, one for rust rust_d3_geo_voronoi and one for javascript d3-geo-voronoi. Rust runs as a service worker with no direct control the DOM. Passing objects as JsValue between threads has negative performance impacts despite this benchmark runs twice as fast.
-
Node like environments: The github repository associated with crate has two "profile targets" and two "benches" which can be used to to spot bottlenecks in this environment. The benches are Criterion.rs based micro benchmarks.
Flamegraph
A profile_target is binary that outputs a HTML page containing a SVG image showing the globe with graticule markings.
A flame-graph can be created by entering a particular profile targets directory and running :-
cd profile_target/albers_usa
sudo CARGO_PROFILE_RELEASE_DEBUG=true cargo flamegraph
The complexity of rendering 240 countries/polygons provides a good view in memory allocation issues.
Coding Standard
-
Idiomatic RUST, as defined by cargo clippy where possible.
-
No booleans as arguments to functions/methods, use two state enums instead.
See "Reflect" as an example.
pub trait ReflectSet { /// f64 or f32. type T; /// Set the projection builder to invert the x-coordinate. fn reflect_x_set(&mut self, reflect: Reflect) -> &mut Self; /// Set the projection builder to invert the y-coordinate. fn reflect_y_set(&mut self, reflect: Reflect) -> &mut Self; }This allows for a clearer statement of intent :-
builder.reflect_y_set(Reflect::Flipped); -
"Type-Driven API Design" is the preferred way of constructing state machines.
In the example below, when assembling a stream pipeline, connect() can only be called when the state is "Unconnected". The output type's STATE is "Connected<SINK>".
impl StreamTransformRadians<Unconnected> { #[inline] /// Connect this node to the next element in the pipeline. pub const fn connect<EP, SINK, T>(self, sink: SINK) -> StreamTransformRadians<Connected<SINK>> where SINK: Clone, { StreamTransformRadians(Connected { sink }) } }The "Stream" trait is only implemented when the STATE is "Connected<SINK>". By design, all code is prevented from calling line_start() or point() unless the object has been connected to another pipeline stage.
Future 3.0 upgrades
"Semantic Versioning" guidelines :-
- Increment the major number when a breaking change occurs.
- Increment the minor number when a new feature is added, @deprecated notes added to outdated functions,
- Increment the patch number for tightly focused security fixes.
Future Work.
-
Since I ported this code ... the javascript has added a digits() function to control the precision of numbers as they are output as strings. ( I need to implement this upgrade )
-
rayon is rust's crate for multithread support. Since this crate is focused on web development and so incoperating wasm-bindgen-rayon. wasm-bindgen_rayon recommends using nightly - and so it far from production read. I have made extensive use of iterators when porting the code and rayon support the easy conversion of single threaded iterators to multithread iterators.
Architecture discussion
There is an aspect of the design that needs review. It related to the best way to implement a doubly-linked list which has cross links between nodes.
The clipping algorithm in clip/rejoin/mod.rs needs to be refactored.
see The intersection Problem.
Test coverage in that area is high so the algorithms is working but the data structures make extensive use of vectors ( heap objects ) containing references to other heap objects Vec<Options<Rc<RefCell<_Intersection_>>>> which is not performant.
A full discussion can be found here
Unimplemented sections of the library
Support for a custom projection is not yet supported.
For an example of this see the test labelled "projection.fitExtent(…) custom projection"
Dependencies
~7–19MB
~254K SLoC