32 releases
| 0.4.13 | Apr 1, 2025 |
|---|---|
| 0.4.8 | Mar 21, 2025 |
| 0.4.2 | Dec 29, 2024 |
| 0.3.9 | Nov 26, 2024 |
| 0.1.3 | Mar 8, 2024 |
#282 in Parser implementations
263 downloads per month
Used in 4 crates
6.5MB
8K
SLoC
rs1090
rs1090 is a Rust library to decode Mode S, ADS-B and FLARM messages.
It takes its inspiration from the Python pyModeS library, and uses deku in order to decode binary data in a clean declarative way. The project started as a fork of a very similar project called adsb-deku, but modules have been refactored to match pyModeS design, implementations extensively reviewed, simplified, corrected, and completed.
The directions ambitioned by rs1090 include:
- improving the performance of Mode S decoding in Python;
- exporting trajectory data to cross-platform formats such as JSON, gRPC, arrow;
- providing efficient multi-receiver Mode S decoding;
- serving real-time enriched trajectory data to external applications.
If you just want something stable to decode ADS-B messages from your Raspberry and visualize the data on a map, you may want to stick to one of the dump0190 implementations.
The rs1090 library comes with:
- a companion application decode1090,
- a live decoder jet1090,
- a Python binding rs1090.
- and a WebAssembly binding rs1090-wasm.
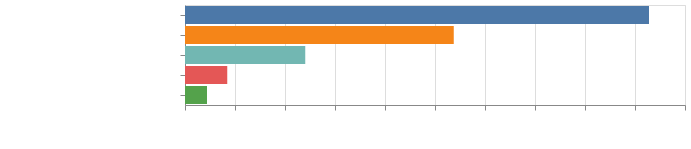
Performance
Benchmarking performed on the decoding of a gate-to-gate European flight:
- pyModeS in full Python mode;
- pyModeS with Cython compiled functions;
rs1090with Python bindings on a single core (for a fair comparison);rs1090with Python bindings on many cores (default);- full Rust
rs1090benchmark on many cores (default).
The Python script for benchmarking is in python/examples.
The Rust benchmark is executed with cargo bench.
Both scripts are run on an Intel(R) Core(TM) i7-10850H CPU @ 2.70GHz.
[!NOTE]
The default out-of-the-box mode ofrs1090is an execution distributed on all your cores. This benchmark was performed on a regular laptop. It can be much faster on supercomputers, but considering that most laptops now have at least 4 cores, this benchmark yields the speed-up you should get on your own computer.
Installation
Run the following Cargo command in your project directory:
cargo add rs1090
Or add the following line to your Cargo.toml:
rs1090 = "1.0.0" # check for the latest version, we are not there yet
Usage
use hexlit::hex;
use rs1090::prelude::*;
fn main() {
let bytes: [u8; 14] = hex!("8c4841753a9a153237aef0f275be");
// ADS-B decoding
if let Ok(msg) = Message::try_from(bytes.as_slice()) {
// JSON output
let json = serde_json::to_string(&msg).expect("JSON error");
println!("{}", json);
}
}
See more examples in the crates/rs1090/examples folder.
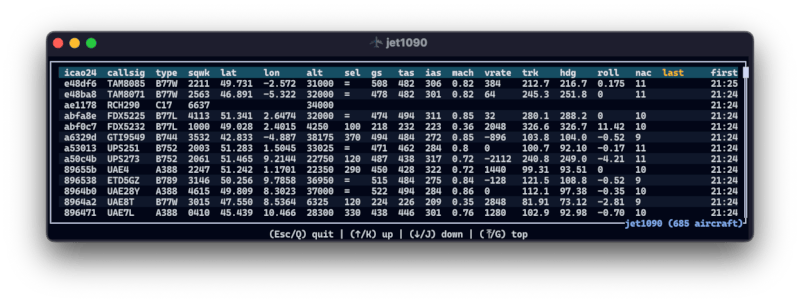
jet1090
The jet1090 executable is documented on https://mode-s.org/jet1090
Python bindings
You may install the bindings compiled for most Python versions with:
pip install rs1090
The library provides a single do-it-all function called decode():
>>> import rs1090
>>> rs1090.decode("8c4841753a9a153237aef0f275be")
{'df': '17',
'icao24': '484175',
'bds': '06',
'NUCp': 7,
'groundspeed': 17.0,
'track': 92.8125,
'parity': 'odd',
'lat_cpr': 39195,
'lon_cpr': 110320}
For large sets of messages in Python (e.g. what you can download through pyopensky):
>>> import rs1090
>>> rs1090.decode(msg_list, ts_list) # includes CPR to position decoding
...
>>> rs1090.decode(msg_list, ts_list, reference=(lat0, lon0)) # useful for surface messages
...
For FLARM messages (also as batches):
>>> msg = "7bf2381040ccc7e2395ecaa28e033a655d47e1d91d0bf986e1b0"
>>> rs1090.flarm(msg, 1655279476, 43.61924, 5.11755)
{'timestamp': 1655279476,
'reference_lat': 43.61924,
'reference_lon': 5.11755,
'icao24': '38f27b',
'is_icao24': True,
'actype': 'Glider',
'latitude': 43.6812864,
'longitude': 5.150585599999999,
'geoaltitude': 970,
'vertical_speed': 1.0,
'groundspeed': 18.698261951315153,
'track': 29.655457935479006,
'no_track': False,
'stealth': False,
'gps': 129}
WebAssembly bindings
Usage is documented on https://observablehq.com/@xoolive/rs1090.
decode1090
Prebuilt binaries are available on the Releases page.
Usage is available with the help command.
decode1090 --help
Nix platform
This repository provides a Nix flake configuration for building and managing this project.
You may run the following to get the jet1090 and decode1090 executables in your PATH
nix profile install
For reference:
nix develop # open a shell with the proper environment to compile rs1090
nix build # build the jet1090 executable
nix run # run the jet1090 executable
Dependencies
~7–24MB
~372K SLoC