5 releases
| 0.2.0 | Jul 4, 2024 |
|---|---|
| 0.1.3 | May 6, 2024 |
| 0.1.2 | Mar 5, 2024 |
| 0.1.1 | Jan 14, 2024 |
| 0.1.0 | Dec 31, 2023 |
#1264 in Hardware support
51 downloads per month
480KB
530 lines
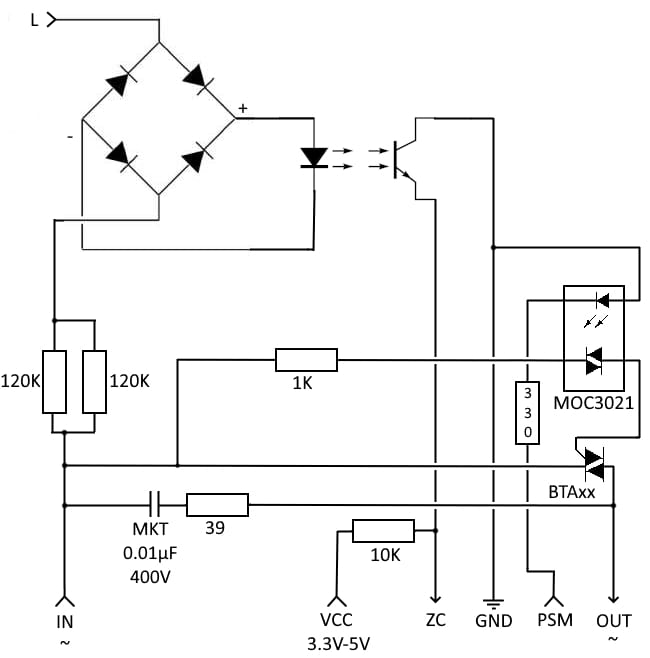
Rust crate for RdbDimmer
What is RdbDimmer?
RdbDimmer is device allow dim power of load. Device use a MOC3021 (no zero-crossing detection).
You can visit RobotDyn Official Store or Official Web site.
Compatibility hardware
This crate works only on ESP32-WROOM-32 (2016) microcontroler.
ESP SKK config
You need add in your sdkconfig.defaults file (at root of your rust project):
CONFIG_ESP_TIMER_SUPPORTS_ISR_DISPATCH_METHOD=y
CONFIG_ESP_TIMER_INTERRUPT_LEVEL=1
Example
unsafe {
let zero_crossing_pin: PinDriver<'static, AnyInputPin, Input> = PinDriver::input(AnyInputPin::new(2)).unwrap();
let d0_pin: PinDriver<'static, AnyOutputPin, Output> = PinDriver::output(AnyOutputPin::new(4)).unwrap();
let id: u8 = 0;
let d = DimmerDevice::new(id, d0_pin);
// Create Power management
let ddm = DevicesDimmerManager::init(DevicesDimmerManagerConfig::default_50_hz(zero_crossing_pin, vec![d])).unwrap();
rbd_dimmer::set_power(id, 100).unwrap();
loop {
rbd_dimmer::wait_zero_crossing().unwrap();
}
}
That's all!
Example for zero-crossing sub-module
// PsmPin abstract to manage Dimmer
pub struct PsmPin<'a, T>
where
T: OutputPin,
{
// The pin to turn on/off
psm: PinDriver<'a, T, Output>,
}
impl<'a, T> PsmPin<'a, T>
where
T: OutputPin,
{
pub fn new(psm: PinDriver<'a, T, Output>) -> Self {
Self { psm }
}
}
impl<'a, T> rbd_dimmer::OutputPin for PsmPin<'a, T>
where
T: OutputPin,
{
fn set_high(&mut self) -> Result<(), RbdDimmerError> {
match self.psm.set_high() {
Ok(_) => Ok(()),
Err(_) => Err(RbdDimmerError::from(RbdDimmerErrorKind::SetHigh)),
}
}
fn set_low(&mut self) -> Result<(), RbdDimmerError> {
match self.psm.set_low() {
Ok(_) => Ok(()),
Err(_) => Err(RbdDimmerError::from(RbdDimmerErrorKind::SetLow)),
}
}
}
// Zero cross pin
pub struct ZeroCrossPin<'a, T>
where
T: InputPin,
{
// The pin to turn on/off
zc: PinDriver<'a, T, Input>,
}
impl<'a, T> ZeroCrossingPin for ZeroCrossPin<'a, T>
where
T: InputPin,
{
fn wait_for_rising_edge(&mut self) -> Result<(), RbdDimmerError> {
let a = block_on(self.zc.wait_for_rising_edge());
match a {
Ok(_) => Ok(()),
Err(_) => Err(RbdDimmerError::other(String::from(
"Fail to wait signal on Zero Cross pin",
))),
}
}
}
impl<'a, T> ZeroCrossPin<'a, T>
where
T: InputPin,
{
pub fn new(zc: PinDriver<'a, T, Input>) -> Self {
Self { zc }
}
}
// This function create all you need.
pub fn new<'a>(
zc_pin: impl Peripheral<P = impl InputPin> + 'a,
dimmer_pin: impl Peripheral<P = impl OutputPin> + 'a,
) -> DevicesDimmerManager<PsmPin<'a, impl OutputPin>, ZeroCrossPin<'a, impl InputPin>> {
let psm_dimmer1 = PsmPin::new(PinDriver::output(dimmer_pin).unwrap());
let zc = ZeroCrossPin::new(PinDriver::input(zc_pin).unwrap());
let dim_device = DimmerDevice::new(0, psm_dimmer1);
let mut devices_dimmer_manager = DevicesDimmerManager::new(zc);
// Add the device
devices_dimmer_manager.add(dim_device);
devices_dimmer_manager
}
More information
Read How it works? for more information.
License
The code is released under MIT License to allow every body to use it in all conditions. If you love open-source software and this crate, please give some money to HaikuOS or ReactOS.
Dependencies
~3–13MB
~156K SLoC