1 unstable release
| 0.4.0 | Mar 1, 2023 |
|---|
#1969 in Embedded development
170KB
3K
SLoC
OpenSensor - Traits & generics for implementing new sensors
Generics for implementing new sensors that interact with the OpenSensor Infrastructure as Code.
Requirements
- rust: Minimum Supported Rust Version 1.65
- lld linker: for faster Rust builds.
- See .cargo/config.toml for platform-specific installation instructions and the Rust Performance Book for the reasons for using lld.
- docker: Container engine
- docker compose: Multi-container orchestration. NOTE:
docker-composeis now deprecated and the compose functionality is integrated into thedocker composecommand. To install alongside an existing docker installation, runsudo apt-get install docker-compose-plugin. ref.
For Debian-based Linux distros, you can install opensensor-rs's dependencies (except Docker, that require special repository configuration documented above) with the following command:
apt-get install clang build-essential lld clang zstd libzstd-dev make cmake pkg-config libssl-dev
opensensor-rs is tested on Ubuntu 22.04 LTS, but welcomes pull requests to fix Windows or MacOS issues.
Quick Start
- Clone repo:
git clone https://github.com/opensensordotdev/opensensor-rs.git
- Ensure all requirements have been installed, especially the lld linker! Otherwise
opensensor-rswon't build!
./bootstrap_cluster.sh: Start the testing Redpanda, MinIO, and monitoring stack.cargo test: Verify all cargo tests pass
Provided Generics
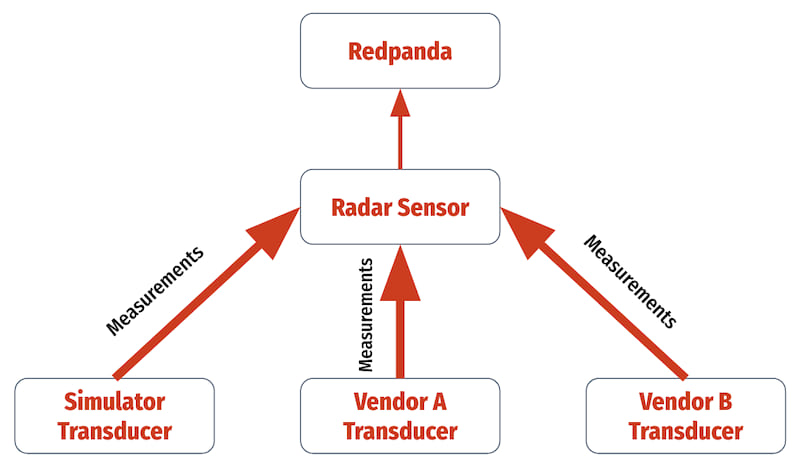
Measurement: The physical data structure representing the discrete unit of data produced by the sensor. EachSensorcan produce multiple kinds ofMeasurements.Transducer: The interface with sensor hardware, producing a stream ofMeasurements.Sensor: The abstraction between multipleTransducersthat produce the same kind ofMeasurements, grouping common validation logic together. Consumes from the mpsc channel that theTransducersendsMeasurementson, validates them, and produces to Redpanda.
Adding New Measurements
Measurements are notionally serialized using Google flatbuffers. For a sample Measurement, Transducer, and Sensor implementation, see the sensor-simple crate in the opensensor repository.
Arrow + Parquet Archiving
In order to make implementing new sensors as straightforward as possible, opensensor-rs seeks to provide automatic archiving of Measurement implementers to Parquet through Rust's Arrow bindings. Experiments for archiving arbitrary Rust structs to arrow and then parquet are documented in the archiver directory and in arrow.rs. Ideally, this functionality would be derivable or implementable through traits to allow arbitrary measurements to be serialized to/from parquet.
Filed this issue on arrow2, but even though their resulting PR fixed the Rust code (the tests in test_arrow.rs now pass), the resulting parquet for any nested arrays or structs still can't be deserialized in pyarrow.
The test cases in test_arrow.rs are based on the following examples:
Dependencies
~75MB
~1.5M SLoC