2 stable releases
| 1.0.1 | May 20, 2024 |
|---|---|
| 1.0.0 | May 18, 2024 |
#1464 in Parser implementations
690KB
698 lines
Parsing .bvh animation files 💀
A Rust library for parsing .bvh files. It not only parses the HIERARCHY and MOTION, but additionaly calculates implicit properties such as global joint positions and rotations, both for the pose (MOTION section) and the rest pose (HIERARCHY section).
Install
Base package:
cargo add bvh_anim_parser
To enable visualization using a bevy app:
cargo add bvh_anim_parser --features visualize
Usage/documentation
See examples/example.rs for an exhaustive usage. This crate offers nothing more than what's presented in that file.
Currently, modifying and writing .bvh files is not supported (let me know if that's something you need).
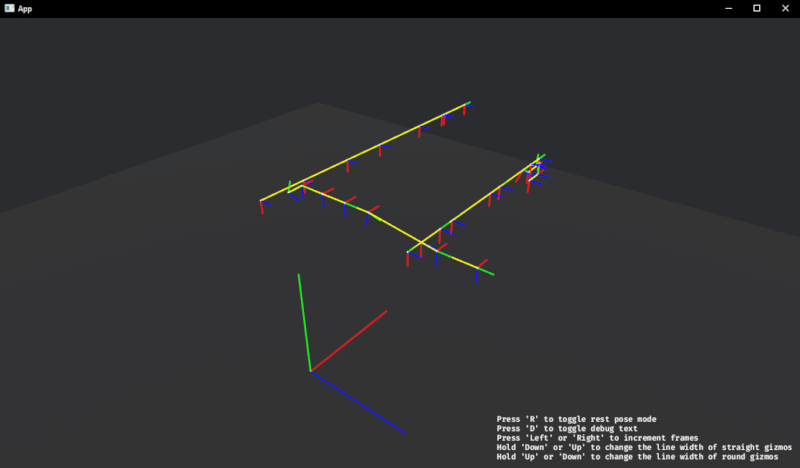
Visualization (bevy app)
The 3 red, green, blue vectors can be associated with the global pose rotations (3 column-vectors of 3x3 rotation matrix). Their origin is literally the global pose position.
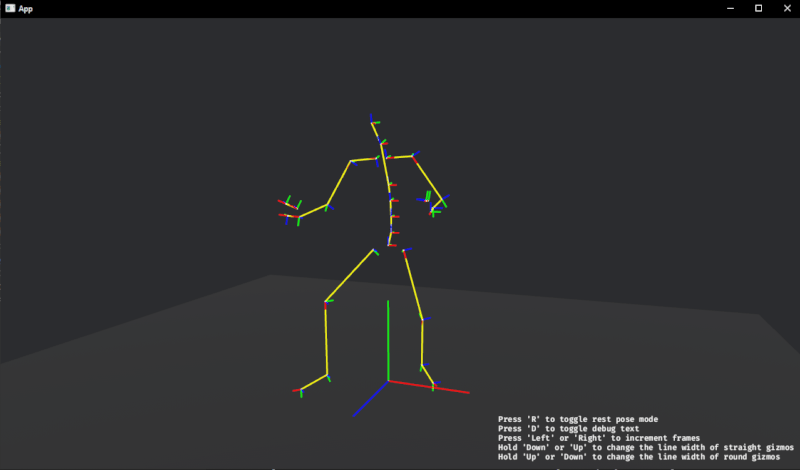 By pressing "R" you can also view the rest pose with its global rest rotations and positions.
By pressing "R" you can also view the rest pose with its global rest rotations and positions.
Codebase structure
src/types.rscontains all the custom structs and types.src/parse.rscontains all the functions involved in parsing bvh files and getting additional info. from them.src/visualize.rsis abevyapp for visualizing loaded .bvh files. It's purpose was to help me ensure the bvh parser produces sensible results.
There are 2 main structs: BvhMetadata and BvhData. BvhData contains numerical data (in the form of 1D and 2D vectors) of positions and rotations of each joint at each frame (both for pose and rest pose). BvhMetadata contains info. such as frame count, fps and joint indices for extracting data out of BvhData.
Convetions
- right handed Y-up coordinate system
Assumptions (no warnings/errors will be given if you violate these!):
- Only one animation (the legend says, you can embed multiple animations into a single .bvh) per .bvh file allowed.
- Hips have translational and rotational components (6 channels), while all the other joints only the rotational one (3 channels).
- All rotational components have the same rotation order. For example, if one joint has YZX order while some other has XYZ, then the parser will parse the rotations incorrectly.
- The non-ENDSITE joint names must not start with the regex 'end*' (case insensitive) - this pattern is used to recognize ENDSITEs.
- One "{" or "}" per line (i.e newlines matter).
FAQ
How are rest pose global joint rotations calculated?
Inspect __get_tail_offset(...) function in src/parse.rs. It returns the "forward" vector, which is then used to calculate rotation (using cross products, etc.).
Other repos
- https://github.com/Wasserwecken/bvhio (Python) - A great .bvh parsing library I've used frequently, and that inspired me to write my own .bvh parser. However, it's not as fast as I would like for large dataset processing.
- https://github.com/burtonageo/bvh_anim/tree/master (Rust) - The highest starred Rust .bvh parser. Seems overengineered and doesn't provide anything that's not already in the HIERARCHY or MOTION section (i.e. doesn't compute rest pose orientations, doesn't do forward kinematics, therefore you can't get global joint positions/rotations, etc.)
Contributing
Everyone's welcome. Smash that "New issue" button.
Roadmap
- modifying and writing .bvh files
- fast serialization and deserialization to disk
- multithreaded parsing (especially when doing forward kinematics or when parsing MOTION section)
- ... your ideas? :)
Dependencies
~76–120MB
~2.5M SLoC