8 releases
| new 0.2.3 | May 9, 2025 |
|---|---|
| 0.2.2 | Nov 17, 2024 |
| 0.2.1 | Jun 9, 2024 |
| 0.2.0 | May 26, 2024 |
| 0.1.1 | Jun 4, 2023 |
#1705 in Embedded development
Used in gledopto
26KB
534 lines
Button driver
This crate is a button driver for embedded Rust projects.
It offers various usage scenarios, supports ESP, embedded_hal, embassy and no_std targets.
This crate aims to be as flexible as possible to support various HALs and use-cases.
Examples
For more examples consider looking into the examples folder.
You can easily flash them using cargo run command!
For ESP32C3 with std:
Required features: std, embedded_hal
use std::time::Instant;
use button_driver::{Button, ButtonConfig};
use esp_idf_hal::{gpio::PinDriver, prelude::Peripherals};
use esp_idf_sys::EspError;
use log::info;
fn main() -> Result<(), EspError> {
esp_idf_svc::log::EspLogger::initialize_default();
let peripherals = Peripherals::take().unwrap();
let pin = PinDriver::input(peripherals.pins.gpio9)?;
let mut button = Button::<_, Instant>::new(pin, ButtonConfig::default());
loop {
button.tick();
if let Some(dur) = button.held_time() {
info!("Total holding time {:?}", dur);
if button.is_clicked() {
info!("Clicked + held");
} else if button.is_double_clicked() {
info!("Double clicked + held");
} else if button.holds() == 2 && button.clicks() > 0 {
info!("Held twice with {} clicks", button.clicks());
} else if button.holds() == 2 {
info!("Held twice");
}
} else {
if button.is_clicked() {
info!("Click");
} else if button.is_double_clicked() {
info!("Double click");
} else if button.is_triple_clicked() {
info!("Triple click");
} else if let Some(dur) = button.current_holding_time() {
info!("Held for {:?}", dur);
}
}
button.reset();
}
}
TODO
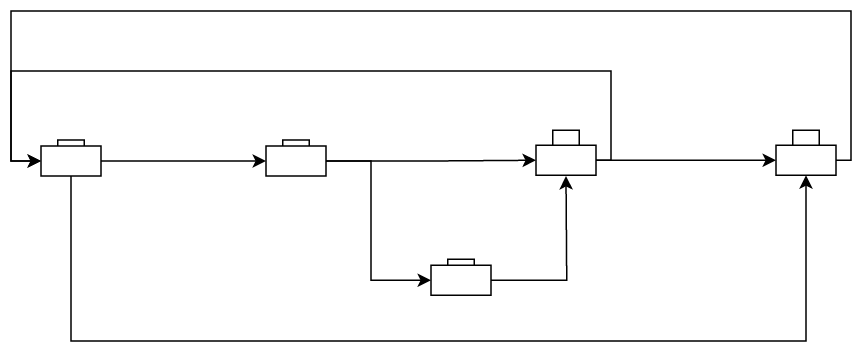
Algorithm
High-level state machine diagram
Dependencies
~185KB