4 releases (2 breaking)
| 0.3.0 | Nov 14, 2019 |
|---|---|
| 0.2.0 | Nov 8, 2019 |
| 0.1.1 | Nov 8, 2019 |
| 0.1.0 | Nov 8, 2019 |
#480 in Science
660KB
331 lines
tls_3d_to_2d
CLI tool for transforming Hancock terrestrial LiDAR binary polar format to 2D image for quick inspection.
Description
This tool will project the 3D TLS polar point format to 2D format. The projection considers the point cloud as approximately spherical around the sensor, and projects it to a cylinder, just like the mercator projection. So the equations for calculating x and y are:
![]()
![]()
Where:
- W: projected image width
 : azimuth in degrees
: azimuth in degrees : zenith in degrees
: zenith in degrees
From those equations we can project x and y coordinates to a gridded image, the pixel values will correspond to the average of the reflectance values of all pixels belonging to that cell.
Usage
Basic
tls_3d_to_2d -z 35 -Z 125 -d 0 -D 40 --output output.png input_file.bin
It will project the cloud point from 0 to 40 meters horizontal distance from sensor and from 35 to 125 degrees of zenith. If min zenith is 0 degrees, it will lead to the calculation of cot(0 degrees) which is infinity thus leading the program to panic.
Multiple frames
We can use it to produce a video from multiple frames walking through the point cloud from one distance to another. The usage is:
tls_3d_to_2d -z 35 -Z 125 --mult-frames 120 --mult-dist-from 0 --mult-dist-to 30 --sigma 1 --mult-range-view 8 --output output.png input_file.bin
It will output 120 frames (--mult-frames 120) walking from distance 0 (--mult_dist_from 0) to 30 (--mult_dist_to 30), using a gaussian smoothing factor sigma of 1 (--sigma 1) with a visible range of 8 meters (--mult-range-view 8). The algorithm will:
- For
iin 0 to 30, splitted in 120 parts:- Let
ibe the mid distance - Calculate minimum distance:
i - (range_view/2) - Calculate maximum distance:
i + (range_view/2) - Project to 2D the points between minimum and maximum distances
- Do gaussian smooth by horizontal distance: mean =
iand sigma defined by--sigma or -s OPTION - Create an image as
OUTPUT_NAME.{n}.png, where{n}will be replaced by numbers from 0 to 119 for each step.
- Let
Coloring other than grayscale
You should be able to transform grayscale png output format to false color using something like imagemagick, for instance. The command line would be somethink like:
convert {INPUT_FILE} -normalize ( xc:black xc:red xc:yellow xc:blue +append -filter Cubic -resize 600x1! ) -clut {OUTPUT_FILE}
This would convert the {INPUT_FILE} grayscale to a black->red->yellow->blue scale. But if you are going this way you should be careful to actually not apply the gaussian to the grayscale images, instead you should use the --split or -S flag to split the output images between the reflectance part and the gaussian_weigths, the files should be named {OUTPUT_FILE}.{n}.png for the reflectance data and {OUTPUT_FILE}.{n}.g.png for the gaussian weights. Then you can first apply the false color to the reflectance data as explained previously and then fade it out by the *.g.png gaussian weight using something like:
convert {INPUT_REFLECTANCE_FALSE_COLOR_FILE} {INPUT_GAUSSIAN_WEIGHTS} -compose multiply -layers flatten {OUTPUT_FILE}
Creating a video file
There are many solutions for converting sequential images to video files, I've used ffmpeg for that, with the following command line:
ffmpeg -start_number 0 -i {INPUT_IMAGE_PATTERN} -c:v libx264 -vf "fps=23,format=yuv420p,pad=width=ceil(iw/2)*2:height=ceil(ih/2)*2" {OUTPUT.mp4}
The strange part pad=width=ceil(iw/2)*2:height=ceil(ih/2)*2 will handle odd heights and widths, or else it could fail. The {INPUT_IMAGE_PATTERN} should be something like images_%3d.png which will match files with prefix images_ + three digits number + .png.
Note
This is a command line tool, it can accept multiple files and will run in parallel.
Example
$ cargo install tls_3d_to_2d
$ tls_3d_to_2d --help
3d-to-2d 0.3.0
USAGE:
tls_3d_to_2d [FLAGS] [OPTIONS] --output <output> [file]...
FLAGS:
-h, --help Prints help information
-p, --progress
-S, --split Save splitted gauss weights and reflectance images (see README)
--version Prints version information
OPTIONS:
-D, --dist-max <dist-max> Maximum distance [default: 20.0]
-d, --dist-min <dist-min> Minimum distance [default: 0.0]
-f, --mult-dist-from <mult-dist-from> From distance (multiple images, see readme) [default: -1.0]
-F, --mult-dist-to <mult-dist-to> To distance (multiple images, see README) [default: -1.0]
-t, --mult-frames <mult-frames> Total frames (multiple images, see README) [default: 120]
-V, --mult-range-view <mult-range-view> Range view (multiple images, see README) [default: 6.0]
-n, --n-threads <n-threads> Number of threads to run multiple files in parallel [default: 0]
-o, --output <output> Output file name
-s, --sigma <sigma> Sigma gaussian smoothing factor from range center [default: 0.0]
-w, --width <width> Azimuth pixel resolution [default: 1800]
-Z, --zen-max <zen-max> Maximum zenith [default: 120.0]
-z, --zen-min <zen-min> Minimum zenith [default: 30.0]
ARGS:
<file>... Input file list space separated
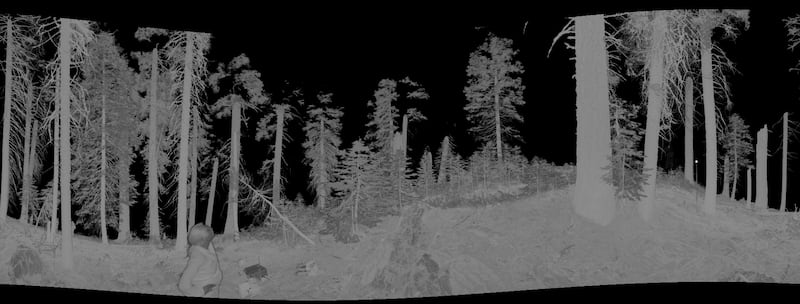
Output example:

Dependencies
~10–18MB
~225K SLoC