1 unstable release
| 0.2.1 |
|
|---|---|
| 0.2.0 |
|
| 0.1.5 |
|
| 0.0.0 | Feb 18, 2024 |
#23 in #2d-grid
45 downloads per month
11KB
199 lines
line_of_sight
A crate for finding the line of sight on a 2D grid.
Example
use line_of_sight::ShadowMap;
use line_of_sight::BLOCK;
use line_of_sight::PLAYER;
// create a 16x17 line of sight map with empty cells by default
let mut map = ShadowMap::new_with_empty_cells(16, 17);
// add some obstacles
let obstacles = vec![
(3, 3),
(4, 3),
(5, 3),
(8, 7),
(8, 5),
(6, 9),
(6, 10),
(6, 11),
(7, 11),
(7, 10),
(7, 9),
];
for obstacle in obstacles {
map.set(obstacle.0, obstacle.1, BLOCK);
}
// set the center to be (4, 5)
let center = (4.0, 5.0);
// fully scan the map in the 20 unit radius (in 4 directions. Use `scan_arc` to only scan in 1 direction)
map.full_scan(center, 20.0);
// set (4, 5) to be the "player cell" for visual purposes
map.set(4, 5, PLAYER);
map.show();
Result
[2, 0, 0, 0, 0, 0, 0, 0, 2, 2, 2, 2, 2, 2, 2, 2]
[2, 2, 0, 0, 0, 0, 0, 2, 2, 2, 2, 2, 2, 2, 2, 2]
[2, 2, 0, 0, 0, 0, 0, 2, 2, 2, 2, 2, 2, 2, 2, 2]
[2, 2, 2, 1, 1, 1, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2]
[2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 0, 0, 0]
[2, 2, 2, 2, 3, 2, 2, 2, 1, 0, 0, 0, 0, 0, 0, 0]
[2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 0, 0, 0]
[2, 2, 2, 2, 2, 2, 2, 2, 1, 0, 2, 2, 2, 2, 2, 2]
[2, 2, 2, 2, 2, 2, 2, 2, 2, 0, 0, 0, 2, 2, 2, 2]
[2, 2, 2, 2, 2, 2, 1, 1, 2, 2, 2, 0, 0, 0, 0, 2]
[2, 2, 2, 2, 2, 2, 1, 1, 0, 2, 2, 2, 2, 0, 0, 0]
[2, 2, 2, 2, 2, 2, 1, 1, 0, 0, 2, 2, 2, 2, 0, 0]
[2, 2, 2, 2, 2, 2, 0, 0, 0, 0, 0, 2, 2, 2, 2, 2]
[2, 2, 2, 2, 2, 2, 2, 0, 0, 0, 0, 2, 2, 2, 2, 2]
[2, 2, 2, 2, 2, 2, 2, 0, 0, 0, 0, 0, 2, 2, 2, 2]
[2, 2, 2, 2, 2, 2, 2, 0, 0, 0, 0, 0, 0, 2, 2, 2]
[2, 2, 2, 2, 2, 2, 2, 0, 0, 0, 0, 0, 0, 0, 2, 2]
Explanation
- 0 -- unreachable cells
- 1 -- obstacles
- 2 -- reachable cells
- 3 -- center (optional; visual purpose only)
Graphical result
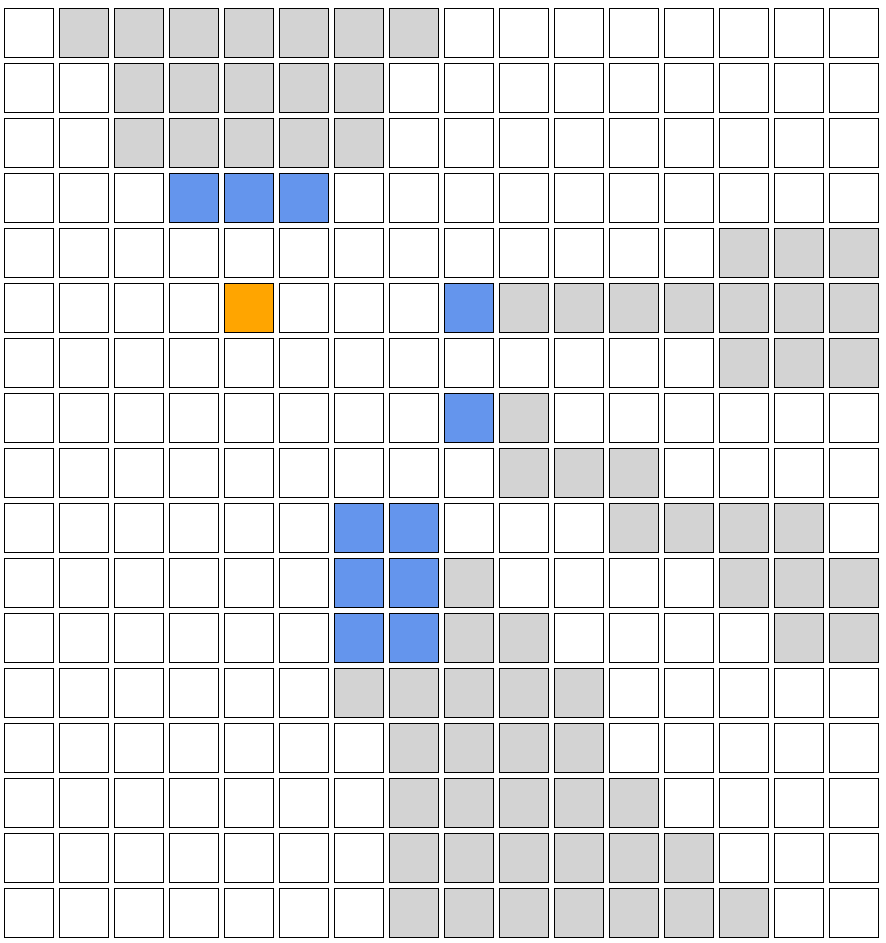
Explanation
- white cells -- reachable cells
- grey cells -- unreachable cells
- blue cells -- obstacles
- orange cell -- center