2 releases
| 0.1.1 | Mar 9, 2024 |
|---|---|
| 0.1.0 | Jan 6, 2024 |
#6 in #state-charts
44 downloads per month
Used in kaori-hsm
17KB
94 lines
kaori-hsm
kaori_hsm state machine library
kaori_hsm is a library for developing Hierarchical State Machines (HSMs) in Rust. Low memory footprint and execution speed are primary focuses of this library as it is designed to run on systems with low resources such as microcontrollers. As being hardware-independent, the library can be run on any system for which there is a rust compiler available for it. Some of the key advantages of this library are:
- No use of dynamic memory allocation
- Fast execution, low stack and program memory usage
- no use of rust standard library, nor any other external crate
What are hierarchical state machines ?
States machines are software entities processing events differently depending on the state in which they are. Different input events may lead to different actions being performed by the state machine and can trigger transitions to other states.
Hierarchical State Machines are state machines which can have nested states. This means that if an event cannot be handled in a state, its super state could eventually handle it. HSMs are therefore particularly useful for designing state machines with complex behavior.
For understanding how state machines and especially HSMs work, I especially recommend the video series made by Miro Samek that you can find here
How to use the library ?
To build your own state machine, you first have to define the structure that will hold its
data and then you will need to implement the following traits of the library on it: the TopState
trait and as many variants of the State<Tag> trait as you want to define states.
The following sequence has to be followed in order to build an operational state machine:
- Create an instance of the structure which will hold the data of your state machine.
- Encapsulate an instance of this structure into an InitStateMachine instance using the [
InitStateMachine::from()] function. - Initialize the state machine by calling the [
InitStateMachine::init()] method on this instance. It will initialize the state machine and lead it to its first state. AStateMachineinstance will be returned from this method. This type represents a fully operational state machine and only exposes the [StateMachine::dispatch()] method used for injecting event variants into it.
Examples across the project
This library features many examples that show you its potential and help you understand how to use it. Most of them can be
run without any specific hardware.
You will find small examples embedded in the library types and functions definitions composing this library. Those examples
focus primarily on featuring the use case of those types and functions.
Then there are more complex examples that you will find in the kaori_hsm/examples directory.
Those are easy to play with and a make a good base for making your own state machines.
Integrations tests in the kaori_hsm/tests directory can also serve the purpose of examples,
but are very rigid and contain a lot of test-specific code.
Finally you will find on this repository
a project designed to test the performance of this library on a stm32f103c8T6 microcontroller.
The performance test may not be easy to understand for a newcomer to the library, but it may be the most practical example.
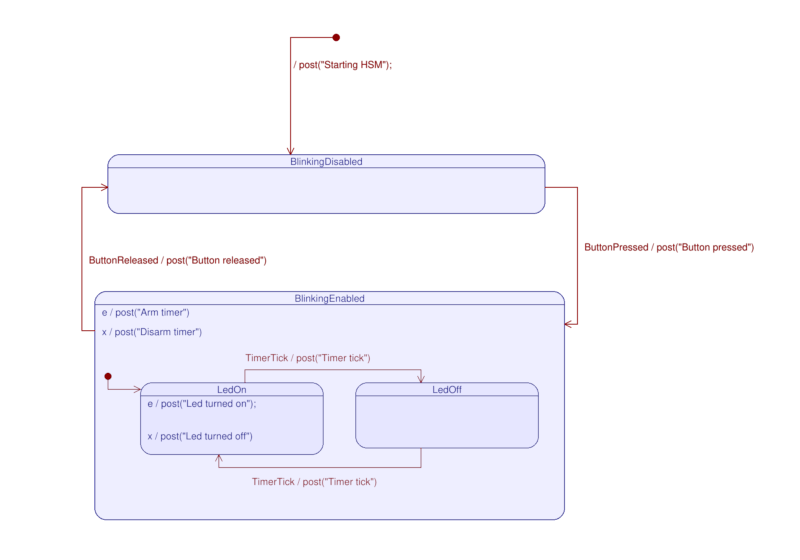
An introductory hierarchical state machine example
The following example features an hypothetical state machine written using the kaori_hsm library. This HSM simulates the blinking
of a led depending on the change of the state of a button. When the state machine boots up, the led is
off. At the time the button is pressed, the led starts blinking. When the button is released, the led
stop blinking.
This example is associated with a testing code. The test uses a queue onto which the HSM posts a
specific string every time it takes a specific action. After initializing the HSM or dispatching
an event to it, the test code checks that the series of strings on the queue matches the expectation.
use std::sync::mpsc::{channel, Receiver, Sender, TryRecvError};
use kaori_hsm::*;
enum BlinkingEvent{
ButtonPressed,
ButtonReleased,
TimerTick,
}
struct BasicStateMachine{
sender: Sender<String>,
}
impl BasicStateMachine{
pub fn new(sender: Sender<String>) -> BasicStateMachine {
BasicStateMachine { sender }
}
// Post a string to the test queue
fn post_string(&self, s : &str){
self.sender.send(String::from(s)).unwrap();
}
}
impl TopState for BasicStateMachine{
type Evt = BlinkingEvent;
fn init(&mut self) -> InitResult<Self> {
self.post_string("Starting HSM");
init_transition!(BlinkingDisabled)
}
}
#[state(super_state= Top)]
impl State<BlinkingDisabled> for BasicStateMachine{
fn handle(&mut self, evt: & BlinkingEvent) -> HandleResult<Self> {
match evt{
BlinkingEvent::ButtonPressed => {
self.post_string("Button pressed");
transition!(BlinkingEnabled)
}
_ => ignored!()
}
}
}
#[state(super_state= Top)]
impl State<BlinkingEnabled> for BasicStateMachine{
fn entry(&mut self) {
self.post_string("Arm timer");
}
fn exit(&mut self) {
self.post_string("Disarm timer");
}
fn init(&mut self) -> InitResult<Self>{
init_transition!(LedOn)
}
fn handle(&mut self, evt: & BlinkingEvent) -> HandleResult<Self> {
match evt{
BlinkingEvent::ButtonReleased => {
self.post_string("Button released");
transition!(BlinkingDisabled)
}
_ => ignored!()
}
}
}
#[state(super_state= BlinkingEnabled)]
impl State<LedOn> for BasicStateMachine{
fn entry(&mut self) {
self.post_string("Led turned on");
}
fn exit(&mut self) {
self.post_string("Led turned off");
}
fn handle(&mut self, evt: & BlinkingEvent) -> HandleResult<Self> {
match evt{
BlinkingEvent::TimerTick =>{
self.post_string("Timer tick");
transition!(LedOff)
}
_ => ignored!()
}
}
}
#[state(super_state= BlinkingEnabled)]
impl State<LedOff> for BasicStateMachine{
fn handle(&mut self, evt: & BlinkingEvent) -> HandleResult<Self> {
match evt{
BlinkingEvent::TimerTick =>{
self.post_string("Timer tick");
transition!(LedOn)
}
_ => ignored!()
}
}
}
let (sender, mut receiver) = channel();
let basic_state_machine = BasicStateMachine::new(sender);
let ism = InitStateMachine::from(basic_state_machine);
// Execute the topmost initial transition of the state machine, leading to BlinkingDisabled
// state
let mut sm = ism.init();
assert_eq_sm_output(&receiver, &["Starting HSM"]);
// Event ButtonReleased is ignored in this state
sm.dispatch(&BlinkingEvent::ButtonReleased);
assert_eq_sm_output(&receiver, &[]);
sm.dispatch(&BlinkingEvent::ButtonPressed);
assert_eq_sm_output(&receiver, &["Button pressed", "Arm timer","Led turned on"]);
sm.dispatch(&BlinkingEvent::TimerTick);
assert_eq_sm_output(&receiver, &["Timer tick", "Led turned off"]);
sm.dispatch(&BlinkingEvent::TimerTick);
assert_eq_sm_output(&receiver, &["Timer tick", "Led turned on"]);
sm.dispatch(&BlinkingEvent::ButtonReleased);
assert_eq_sm_output(&receiver, &["Button released","Led turned off", "Disarm timer"]);
Cargo commands index
The present directory must be kaori_hsm/kaori_hsm to run every cargo command.
Building the lib in release mode
cargo build --release
Running doc test
cargo test --doc
Running a specific integration test
cargo test --test [test_name]
Running a specific example from the examples directory
cargo run --example [example_name]
License
Licensed under either of
- Apache License, Version 2.0 (LICENSE-APACHE or http://www.apache.org/licenses/LICENSE-2.0)
- MIT license (LICENSE-MIT or http://opensource.org/licenses/MIT)
at your option.
License: MIT OR Apache-2.0
Dependencies
~190–620KB
~15K SLoC