4 releases
| 0.1.4 | Mar 28, 2024 |
|---|---|
| 0.1.3 | Mar 28, 2024 |
| 0.1.2 | Mar 27, 2024 |
| 0.1.0 | Mar 27, 2024 |
#451 in Images
87 downloads per month
4.5MB
2.5K
SLoC
Contains (ELF exe/lib, 10MB) pi/aviator

Rust Nation Hackathon 2024
An embedded computer vision hackathon
![]()
Welcome
Welcome to Helsings Rust Nation Hackathon! This is the very first edition of our hackathon and we are glad to have you onboard. Enjoy!
Rules & Setup
- You are going to work in teams of 3-4 people.
- You may not move the drone outside of the enclosure
- Connect to the
hs-rust-nationwifi - please ask for the password from one of the team.
Challenge
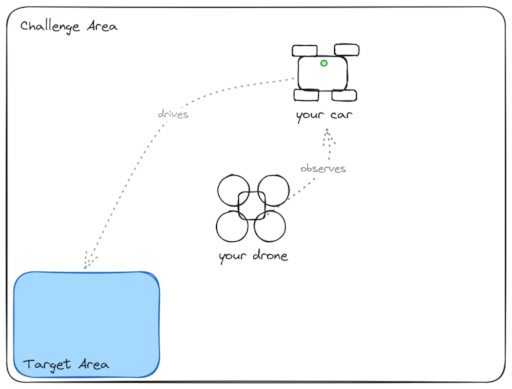
A topdown-view of the challenge setup
You and your team are resposible for writing an application that makes use of computer vision, distributed systems and networking to maneouver your teams car (identified by the colored LED, in the example setup above: green) onto a color coded target (in the example setup above: blue).
The challenge you need to solve here arises from the fact that the car itself has no sensors and all information you have is coming from the drones camera and your computer vision algorithm.
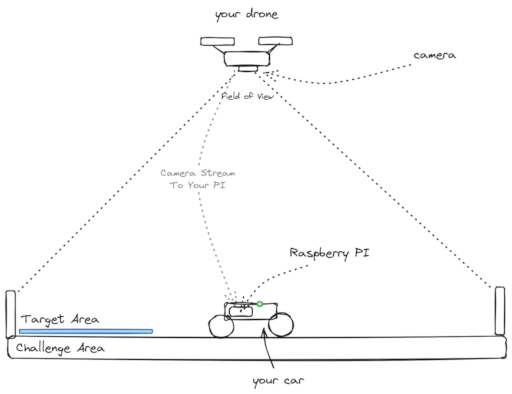
A side-view of the challenge setup
The car is equipped with a Raspberry Pi that has access to the camera stream of the drone and the cars hardware (e.g. you can drive the car from the raspberry pi).
Given the above setup and the libraries provided by helsing you should write the highlevel application logic to:
- Identify your car's position
- Identify the orientation of the car
- Move the car into the color coded target area
Please note: You are expected to develop this on your own laptop. Helsing provides you libraries and deployment tooling, as well as the drone and the car, to make the above achievable in 1-2 hours.
Quickstart
Please make use of the template in order to have a seamless deployment experience
- Form a team of 3-4 people and obtain your team's hardware from helsing staff.
- Fork the repository and grant your team members access
- Clone your teams repository and do a test deployment (to verify everything works)
- Start hacking!
- When you're ready to start driving the car, please ask and we'll connect the power supply.
Deploying
$ rsync --exclude target -r ./ hack@<team>:/home/hack/
$ ssh hack@<team>
Having DNS issues? Try using
nmapand use the car's IP directly. (nmap -sP 192.168.50.0/24)
Positioning the drone
You need to position the drone yourself using ./scripts/aviate (judging the FOV).
You can open http://<car-name>:3000/camera to see the drones image and use
./scripts/aviate <car-name> <command> to position it manually.
FAQ / Trubleshooting
What is our team name?
Your team name is determined by the drones label!
What is the ssh / sudo password?
A helsing staff member will provide you with your credentials
I can't ssh into the car..?
- Verify that the cars raspberry pi is on
- You are on the
hs-rust-nationnetwork - Check that you can reach the car by
ping <team> - If that doesnt work, try
nmap -sP 192.168.50.0/24or ask helsing staff
I don't have access to the aviator (http://<car-name>:3000)..?
- Check that the drone is on (touch the button on the side once)
- Check that you have a
wlp1s0u1u2interface usingifconfig - Wait until you get a ipv4 from the drone on that interface using
watch ifconfig - If that doesnt happen try
sudo systemctl restart drone-wifi - Once you have the ip do a
sudo systemctl restart aviator
Dependencies
~65MB
~1M SLoC