4 releases (breaking)
| 0.4.0 | Mar 2, 2024 |
|---|---|
| 0.3.0 | Dec 9, 2020 |
| 0.2.0 | Dec 8, 2020 |
| 0.1.0 | Dec 7, 2020 |
#1421 in Algorithms
Used in 3 crates
40KB
105 lines
phi-detector
![]()
![]()
![]()
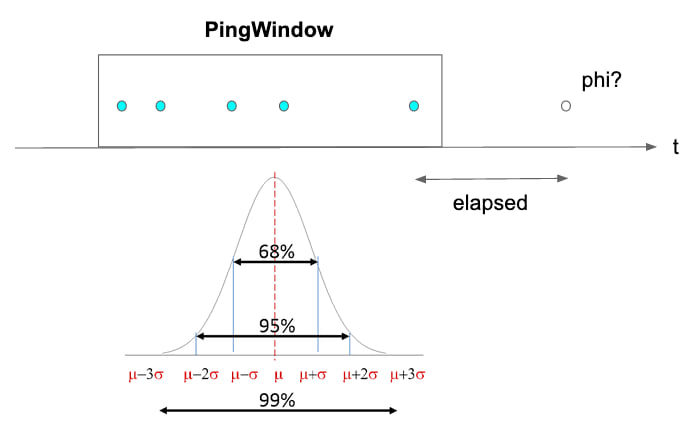
This is a Rust implemention of Phi Accrual Failure Detector algorithm which is clearly described in the figure below. Using this algorithm you can detect remote server failure.