2 releases
Uses old Rust 2015
| 0.1.1 | Nov 16, 2018 |
|---|---|
| 0.1.0 | Nov 13, 2018 |
#1086 in Data structures
Used in smartpool-spatial
230KB
1K
SLoC
Manhattan Tree
The manhattan tree is a spatial tree, based on the octree, that allows logarithmic time insertion, removal, and querying for the element with the lowest manhattan distance to an arbitrary point in space.
Octree
The design of this tree is based on the octree.
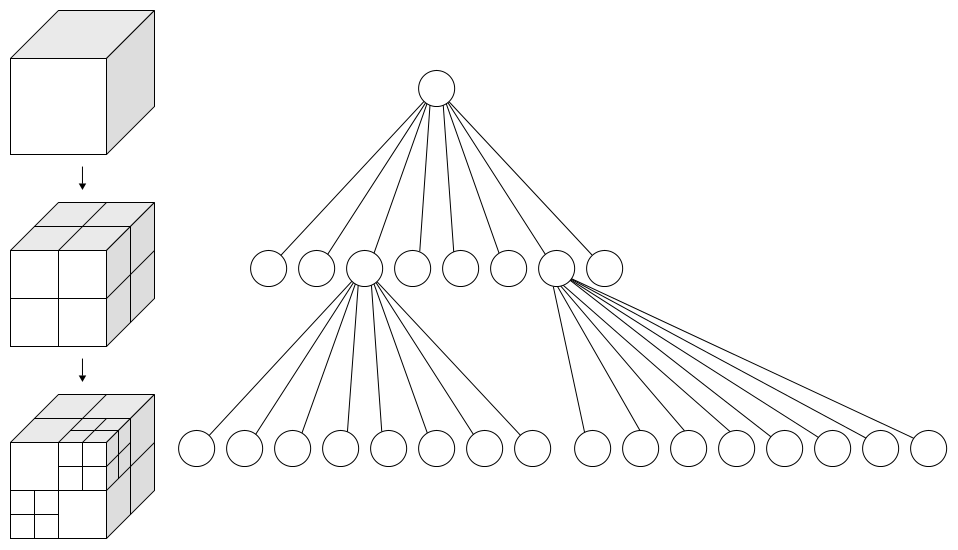
The total domain of the coordinate space is represented as a cube. This cube can be recursively sub-divided into 8 octants.
We introduce two types for tracking these octants:
- The
BaseCoord, containing unsigned integer coordinates,[u64; 3]. - The
OctCoord, containing unsigned integer coordinates,[u64; 3], as well as scale factor,u8.
With these coordinates, we can define the two variants for an Octant (a node of the tree):
Leaf, which contains aBaseCoordand some element that the tree is storingBranch, which contains anOctCoordand 8 optional childOctants
In the case of the branch, in each dimension, the branch's domain covers the coordinate range
from coordinates[n] * (2 pow scale) (inclusive) to (coordinates[n] + 1) * (2 pow scale)
(exclusive).
From here, we can lay out a couple important invariants:
- Only leaves have elements
- Only branches have children
- An octant's domain is always a subdomain of its parent
- A branch always has at least two children
- Each of a branch's children are in a different suboctant of the branch
Tree shortening
This repository implements the manhattan tree in 3 dimensions, but it actually can work in any dimension. Let's take the example of a 1-dimensional manhattan tree.
A balanced 1-dimensional manhattan tree with 32 elements would look like this:
|----------------------------------------------------------------------------------------------|
|----------------------------------------------||----------------------------------------------|
|----------------------||----------------------||----------------------||----------------------|
|----------||----------||----------||----------||----------||----------||----------||----------|
|----||----||----||----||----||----||----||----||----||----||----||----||----||----||----||----|
|-||-||-||-||-||-||-||-||-||-||-||-||-||-||-||-||-||-||-||-||-||-||-||-||-||-||-||-||-||-||-||-|
0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31
A 1-dimensional manhattan tree has a branch factor of 2 pow 1 == 2, and log base 2 (32) == 5,
and this tree has 5 branching layers (not including the root layer, or alternatively,
not including the leaf layer), so it could be considered maximally efficient.
However, let's take a case where there are less elements, and we handle this incorrectly:
|----------------------------------------------------------------------------------------------|
|----------------------------------------------||----------------------------------------------|
|----------------------| |----------------------||----------------------|
|----------| |----------||----------|
|----| |----||----|
|-||-| |-| |-|
6 7 22 24
We have reduced the number of elements, but our tree is still just as tall. And remember, the time complexity of a tree is generally dependent on its height. We want to shorten the tree while maintaining invariants 1 and 3:
Only leaves have elements
An octant's domain is always a subdomain of its parent
Furthermore, this tree structure severely breaks invariant 4:
A branch always has at least two children
Fortunately, invariant 3 does not mean that an octant's domain must be a direct subdomain of its parent; it can be further down the chain. As such, we can shorten the tree by simply cutting out the branches which only have one child, thus actualizing invariant 4, as such:
|----------------------------------------------------------------------------------------------|
|----------------------------------------------||----------------------------------------------|
|-||-| |-| |-|
6 7 22 24
Now, the tree only has a height of three, and each branch has at least two children. Remember that, that although it's now harder to see, each leaf is still in a different suboctant of its parent branch.
Bounds tracking
We include an additional piece of information in each octant, which was not previously mentioned. For each branch, and for each of the three dimensions, we encode the minimum and maximum component in that dimension stored in the entire subtree. This data must be properly maintained upon insertions or removal into the manhattan tree.
Manhattan distance
Given these invariants, we can efficiently perform the manhattan tree's namesake operation: find the element with closest manhattan distance to an arbitrary focus.
The focus is some arbitrary coordinate, just like any other key in the tree.
As such, the function for closest element by manhattan distance to a focus, in Rust-like pseudo code, is as follows:
fn closest(node: Octant, focus: BaseCoord, competitor: Option<BaseCoord>) -> Option<Leaf>:
if node is a leaf:
return the leaf, unless its mahattan dist (henceforth mdist) to focus is greater
...than the mdist between focus and competitor, if competitor exists
if node is a branch:
// here we take advantage of bounds to short circuit, which is the main performance boost
if competitor exists:
for each of the three dimensions:
let a = competitor.mdist(focus)
let b = the distance in that one dimension between focus, and node's
...closest element to focus, according to the bounds tracking
if a < b:
return None
let best = None
for each child, ordered nearest to furthest from focus:
let child_competitor = {
if best exists: Some(best's coord)
else if competitor exists: Some(competitor)
else: None
}
if let Some(better) = closest(child, focus, child_competitor):
best = Some(better)
return best
Bit-level hacking
Many of these operations, which are brushed over by abstract explanations and pseudocode, require operations on coordinates, such as:
- Which suboctant of an
OctCoordcontains a certainBaseCoord - Which suboctant of an
OctCoordis closest to a certainBaseCoord - Convert a
OctCoordinto aBaseCoord - What is the lowest common
OctCoordfor which twoBaseCoords are suboctants
Fortunately, because coordinates under the hood are stored as unsigned binary integers,
and because recursive binary subdivision is performed on each dimension, the binary
properties of the unsigned integers can be exploited to implement all of these operations
using bitwise manipulation. This is best expressed in actual code, which can be found in
the tree/coord module of this crate.
Performance
I ran a performance test on the tree, testing insertion, removal, and closest element querying,
with different sizes of trees. To minimize external variables, these tests were run on a t2.medium
server, rented from Amazon EC2, running Ubuntu server 18.04.
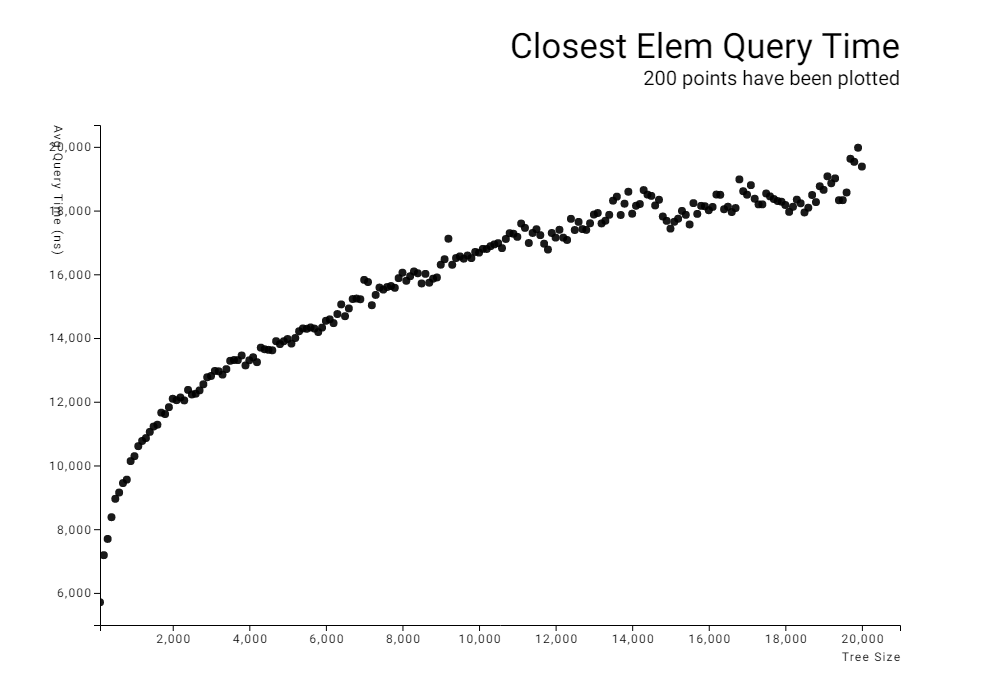
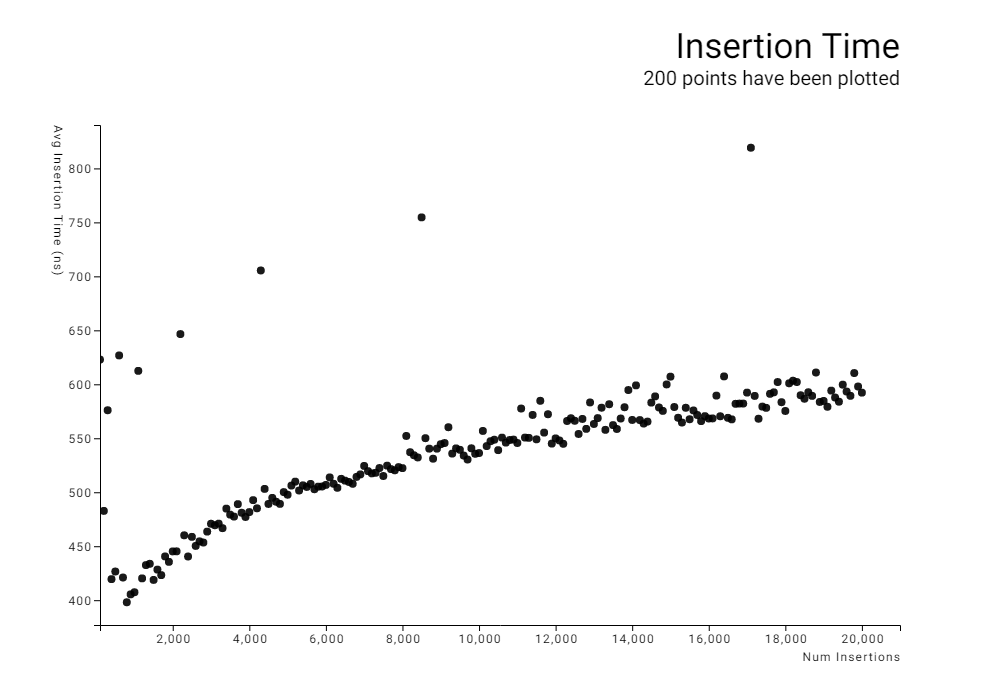
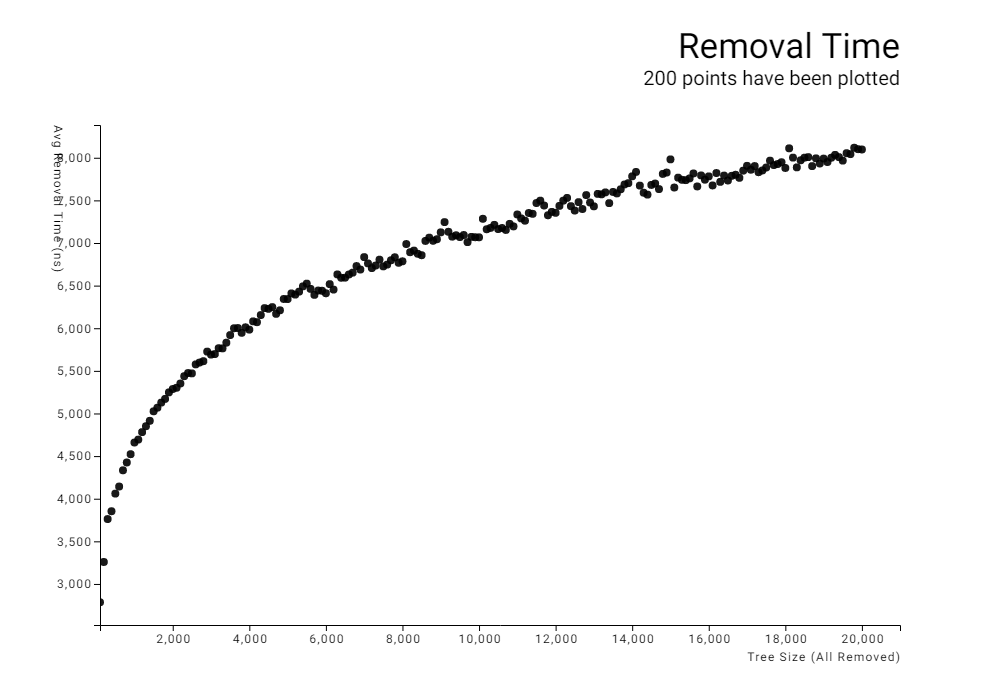
These results clearly show a logarithmic time complexity. Running an additional test, going up to a tree size of 100,000, I manually fitted a natural logarithm function to the data.
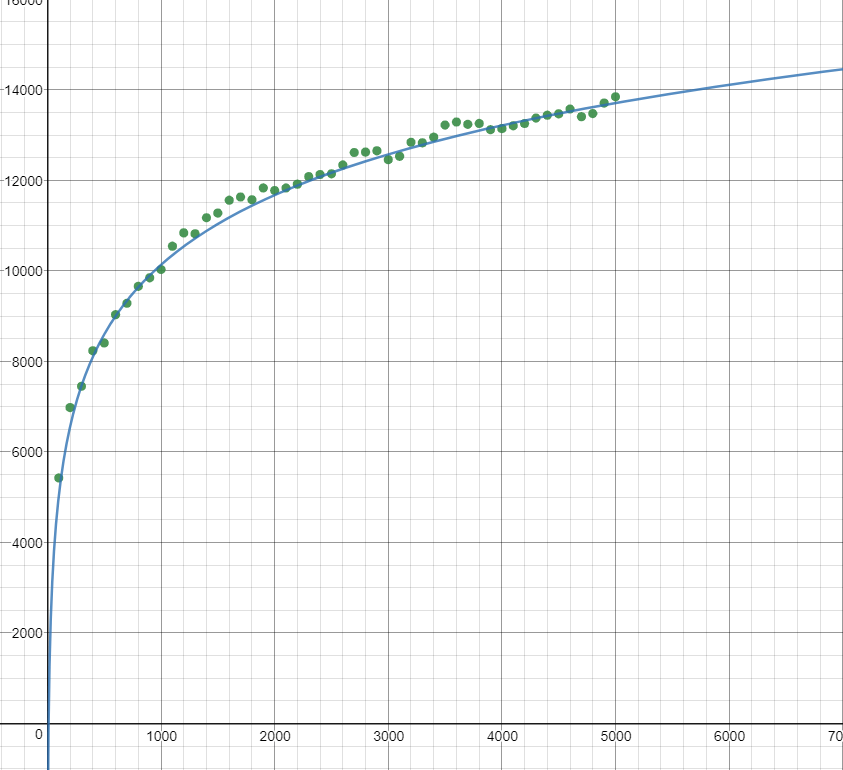
The curve appears to closely follow the relation:
time = 2220ns * ln(size) + 5200ns
Dependencies
~560KB
~11K SLoC